Autonoma vägg kramas Arduino fordon (3 / 7 steg)
Steg 3: Algoritmen:: del 1

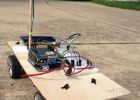
I grund och botten sammansatta IR-sensorn sänder ut en tryckvåg av IR-ljus och läser reflektion. De röda pilarna representerar IR-ljus som skickas från sensorn i bilden ovan, och de gröna pilarna representerar reflekterat ljus. Ju längre bort från väggen du är, desto mindre reflekterat ljus får du.
- Situation A :: om det blir * mycket mer än * önskad mängd reflekterat ljus tillbaka, det måste betyda att du är * mycket nära * på väggen, så du bör idle tillbaka rätt spår ganska lite så att du snabbt gå från väggen.
- Situationen B :: om det blir en högre än önskad mängd reflekterat ljus, som innebär att du är närmare väggen än du borde, så du bör idle tillbaka rätt spår lite för att svänga bort från väggen.
- Situationen C :: om du får "rätt mängd" reflekterade ljuset tillbaka, det måste betyda du är "zonen", så du bör utjämna spår hastighet så att du kommer framåt i en rak linje.
Upprepas om och om och om igen, justerar denna grundläggande algoritm ständigt Rover spårning så att den upprätthåller din önskat avstånd från väggen.
Om du befinner dig för långt bort från väggen, skulle du göra liknande beslut att göra så att du svänger mot väggen av tomgång tillbaka det vänstra spåret.
Exempel på kod...
Kontroll motorer att upprätthålla rätt avstånd från vägg
om (irValue > = IR_HOWCLOSE + 4) {
Situ A) sätt alltför nära, SVÄNGA höger
% av vänster Motor, % av rätt Motor
goForward (100, 60);
}
annars om (irValue > IR_HOWCLOSE) {
Situ B) A lite nära, svänga höger
goForward (100, 75);
}
annars om (irValue > = IR_HOWFAR & & irValue < = IR_HOWCLOSE) {
Situ C) bra, gå rakt
goForward (100, 100);
}
... osv...

Autonoma Sentinel Arduino fordon

1Sheeld kontrolleras Arduino fordon

Autonoma Tank med robotarm (Arduino, Bluetooth)

WiFi / Internet / Android kontrollerade Nerf Vulcan Sentry Gun

1Sheeld styrda robotarm
Arduino Powered autonoma fordon
Arduino autonoma fordon

Autonoma Arduino bil

Swarmbots: Autonoma Arduino bilar som spelar musikaliska stolar

Grunderna i förvandlar ditt Remote Controll fordon till ett autonomt System (Drone) genom att använda en Arduino

CARduino - Arduino-drivna, LabVIEW-kontrollerade fordon

Arduino autonom gräsklippare som CutFlower

Autonoma Arduino bil med infraröd närhets-Sensor

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Autonoma Arduino Rover 5

RC bil till autonoma Arduino Robot

Autonoma Autonavigation Robot (Arduino)

Arduino baserade Robotic Car(wireless controls+Autonomous)
