DIY handgjorda Hexapod med arduino (Hexdrake) (8 / 19 steg)
Steg 8: programmering




Programvara för detta steg:
Arduino IDE, USC sofware.
Innan programmering med arduino är det nödvändigt att veta gränserna för alla servon och vet att gränsvärden. Till exempel med musen för att dra i skjutreglaget i panelen servo (drar servo panel motsvarande till den kanal som servo är ansluten). Så ansluter USC inuti hexapod med usb till de program jag få alla de max och min värden för varje servo.
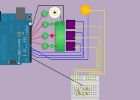
Nu är tid att programmera arduino att styra USC. Servo controller är en slav enhet, vilket innebär att det kan ta emot kommandon eller utföra förinställda kommandon. Det kan inte tänka alls. Kommunikationsprotokoll: seriell kommunikation (TTL nivå), överföringshastighet 9600, ingen kontroll bit, 8 databitar, 1 stoppbit att styra servo via servo controller. Kommandot format är:
-Kontrollera en enda servo:
#1P1500T100\r\n
Data 1 hänvisar till servo är kanal.
Data 1500 hänvisar till servo "läge i intervallet 500‐2500.
Data 100 syftar på tiden av utförandet och representerar hastigheten, i intervallet 100‐9999
-Styra flera servon:
#1 P 600 #2P 900 #8P2500T100\r\n
Data 1, 2 och 8 hänvisar till servo är kanaler
Uppgifterna 600, 900 och 2500 avser lokaler för servon som motsvarar tre kanaler
Data 100 hänvisar till tiden av utförandet och representerar hastigheten på tre servon. Oavsett antal servon finns det bara en tid, eller en T. Kommandot körs på samma gång; det vill säga använda alla servon samtidigt.
Inom ramen för varje servo är nödvändigt att beräkna maximal räckvidd eller "steg" för alla horisontella servon hitta den minsta av dem och konvertera det som högst ett steg. Och denna variabel träda i ekvationerna i alla rörelser. Samma sak skulle ha att göra med vertikala servon.
* Ledsen för den dåliga kvaliteten på de tre första filmerna. Jag spelar in dem med en gammal mobiltelefon med dålig videokvalitet.
Ny video:

Bygga en semi Smart, DIY båt med Arduino och några andra sensorer

DIY-Laser Dj med Arduino
Enkel, enkel och billig DIY stegräknare med Arduino

Att man gör en DIY borstlös Gimbal med Arduino

PHloat2 DIY surt vatten testning skulptur & kit med arduino

AtoZ av RC hobby + DIY radio med ARDUINO

DIY Bluetooth telefon kontrollerade BB-8 Droid med Arduino UNO

DIY TV LCD skärm med Arduino och Smart fjärrkontroll

DIY Webserver med Arduino Mega 2560
Skapa din egen Simon Says game med DIY Electro degen och Arduino!

DIY virtuell verklighet Skateboard erfarenhet med Arduino och Google kartong
DIY: En 5 minuter Arduino Voltmeter med en OLED-Display

DIY automat med Arduino & 1Sheeld
DIY Facebook anmälaren med Arduino - Arduino Facebook Notifier (v.0.1.1) - öppna källkodsprojekt

DIY Android Bluetooth PC gamepad med arduino leonardo

DIY: En 5 minuter kontaktlösa OLED termometer med Arduino och MLX90614

DIY Remote Controller för Hexdrake

Kraftfull kontroll med Arduino: Gränssnitt ett linjärt ställdon
