Hålla nära mig (digilent robot projekt) (6 / 6 steg)
Steg 6: Anslutning av moduler
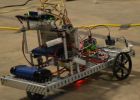
Robotens batteri är anslutet till den chipKit 5 V utgång. En av robotens marken ansluts den gemensamma grunden. 2 seriell kommunikation stiften är anslutna till chipKit: robotens RX (pin 1) är ansluten till den chipKit TX1 (pin 18), och robotens TX (pin 2) till den chipKit RX1 (pint 19).
4 MaxSONAR marken är anslutna till den gemensamma grunden. RX-pinss är anslutna till 82, 79, 76, 73 stift. PWM stift är anslutna till 81, 78, 75, 72 stift. 4 mosfet Visa makt till ekolod. Trodde de MOSFETs vi kan sätta på och stänga av ekolod.
MOSFETs gate stiften är anslutna till 11, 8, 5, 2 stift trodde 200 ohm 4 motstånd. Den mosfets källa är anslutna till den ekolod 5 V stift och den mosfets avlopp ansluter till 5 V batteri.
Kompassen har SCL och SDA stift, som ansluter till chipKit "SCL och SDA liknande stift.

Digilent FPGA projekt med Tcl skript
Hem Sentry Robot projekt för Intel-IoT turnén i Austin, TX av RoboDorks

Hålla mig Cool portabel luftkonditionering svalare 120V

Belvedere - en Butler Robot

Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt)

PicRobi trådlös robot plattform

Enkla RC kil Robot

Multi-purpose Plywood Robot prototyper Base

Dual Core Arduino / Atemga328 - Robot Controller & Audio Player

Självlärande Rock - papper - sax Robot från Lego Mindstorms NXT!

Keres, en ficka storlek kämpar robot.

Dextrus v1.1 Robotic Hand

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Ställa in Zybot - hårdvara

Så vill du bygga en gigantisk robot.

Två hjul Robot Design & simulera

Arduino Robot V2 (snabb) också röst kontrollerat

Arduino-baserad robot med IR radar
