Hector Hexapod: billigaste Hexapod w / Arm(Arduino) (3 / 5 steg)
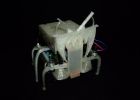
Steg 3: Sparkfun/Dagu Hexapod chassis










Fullständiga instruktioner om montering hexapod chassit kan hittas här:
http://cdn.Sparkfun.com/datasheets/Robotics/Hexapo...
Hur denna Hexapod promenader gör det verkligen viktigt att placera varje servo på nästan exakt center om du vill undvika komplicerade felkorrigeringar i koden. Annars kommer hexapod promenad krokiga eftersom servon inte är i synk.
En spindel mikrokontroller visas på rutan i detta chassi och är den rekommenderade styrmedel. Jag bestämde att det skulle vara bättre att använda en Arduino och Adafruit Servo sköld. Antingen kommer att fungera för detta projekt, men jag inte har använt Spider controller jag kan inte säga säkert att det inte blir några komplikationer med koden. Det tog mig lite tid att lista ut i vilken ordning att ansluta servon. Börjar med rygg, vänster benet som 0 och fortsätter runt cirkeln kommer tillbaka till tillbaka höger ben som 11.
1. efter byggnad fästa chassit, Arduino w / anslutna sköld på undersidan av chassit (jag använde sopor band)
2. skala tillbaka papperet bort av bakbord och sticka den självhäftande sidan till toppen av chassit
3. Fäst alla anslutningar till Arduino med 22awg tråd utfodring trådarna men att hålen är riktade till skärbräda
4. Lägg till IR-mottagaren diod, reaktion LED och batteri innehavaren att det set av brödunderläggen och Anslut
5. Anslut den 2,1 mm kvinnliga nätadapter till Adafruit sköld med 22awg wire
6. dra blytaket av LED genom hålen i benen och ansluta varje GND till ett 560 ohm motstånd leder till GND järnväg och VCC till en 5v järnväg
7. lägga till ett 9-volts batteri och 5v nätadaptern i skölden och Hexapod är redo att gå.
För att kontrollera hexapod använder en tv remote du kommer att behöva avkoda signalerna som skickas från fjärrkontrollen. För att anpassa koden till din remote bara kopiera värdena du ges för varje knapp med deras motsvarande knapp i koden. En detaljerad handledning för avkodning någon fjärrkontroll kan hitta här:
Hexapoduino: liten hexapod 3D tryckt, Arduino kontrollerade

Robot Arm Arduino App

Arduino omarbeta Station

Arduino ledde Dice

Ljus Sensing lysdioder

Arduino Hexapod (med en personlighet)

Arduino Hexapod Avoider Robot

Arduino Mega Hexapod

Hexapod Arduino Pololu Maestro Servo Controll

Enkel 18dof Hexapod, Arduino nano (eventuellt med pololu maestro)

DIY Arduino hexapod

DIY handgjorda Hexapod med arduino (Hexdrake)

Göra en verklig (billigt) hexapod!

Hexapod robot

Hur man bygger en trådlös hexapod robot

Geoweaver: En vandrande 3D-skrivare Hexapod

Hexapod

Xbox 360 ROBOTARM [ARDUINO]: AXIOM ARM
