Robotarm med kaffe gripdon (3 / 7 steg)
Steg 3: Versionsnummer










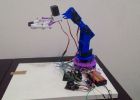
Bygga den vertikala arm. Ta bort plasten från stadens växel genom att smälta det med en lödkolv, notera detta inte är säker. Om du har en Dremel eller en borr och sedan använda det för att ta bort plasten. Redskap som bör passa på spindeln från hårddisken. Bifoga redskap med Loctite epoxispackel. Låt spacklet bota över natten så att du har en bra passform.
Nu måste du bifoga ett kugghjul till andra servo. Ta det andra redskapet och ta bort centrum med en 1/4 tums bit. Nu ta bort korset från motorn och använda den för att markera hålen för där du kommer att bifoga det till servo. Du behöver två hål för varje gren av korset. Använda en 1/8th tum bit för att borra hål. Sedan mata några tråd i genom korset och växel att fästa två. Sedan skruva den arga tillbaka till servo.
Ta två mindre bitar av skrot trä och skruvas fast dem i basen för att hålla servo som styr den horisontella rörelsen. Välj sedan några skrot trä så att redskapet på servo träffar redskap på hårddisken. Koppla hårddisken spindeln till basen med naglar. Använd zip band för att hålla trycket på växlarna.
Äntligen borra fyra 1/8th tum hål i toppen av den vertikala arm. Detta är för servo ska bifogas. Fäst andra servo till toppen av bambu med hjälp av ståltråd och vrida den runt servo. Fäst bambu bas redskap med en generös mängd av epoxispackel. Låt det botemedel för övernattning.

Styra en robotarm med Microsoft Kinect!

Hemgjord robotarm med hjälp av standarddelar använder Arduino och en bearbetning GUI

Bygga en 5-axlig robotarm med Arduino och DynamixShield

Kontroll robotarm med handskar, Android-telefon och Arduino

ROBOTARM med USB PC-gränssnitt (plus hur man monterar)

Interaktiva sökvägen följande robotarm med pfodApp

Bygga robotarm med Makeblock delar

Robotarm med servomotorer

Min nionde projekt: Robotarm med Joystick sköld

Robotarm med bipolär stepper

Rörlig robotarm med PHIRO + Arduino
Bygga robotarm med 3DP +Arduino(用3DP+Arduino製作機械手臂)
Lära sig att måla med kaffe pulver - nybörjare målning lektioner

BT mobila Ctrl stammen robotarm med String

Styra en robotarm med Arduino, 1Sheeld och en Android Smart Phone

Kontrollera ArmLinkLibrary-master robotarm med Arm länk programvara

Robotarm med transportband, kunna monteringsarbete stycken pågår

Bygga några PAR38 burkar med kaffe burkar
