Self balancing skateboard/segw * y projektet Arduino Shield

Gallmänna ändamål Arduino shield för egen balanseringsmaskiner.
Varför gjorde jag det?
Jag har tidigare gjort en Instructable 2010 om hur man bygger en självbalanserande skateboard.
Det finns > 500 kommentarer på detta och många uttrycker förvirring ställa in balans sensorer, programvara och elektronik. På toppen av det, utgång analog tröghetsbaserad måttenheter som var allmänt tillgängliga stannade som görs.
Alla mina själv balansera projekt är nu på min Youtube-kanal här: Klicka
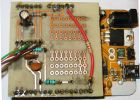
Här har jag tagit en lågpris dunkla analoga IMU som för närvarande fortfarande är tillverkade i Kina, som är tillgänglig på ebay, och används en Arduino prototyping "sköld" att montera alla delar, däribland en kabel till en grundläggande hand-styrenhet (för styrning och finjustera den balans punkten) och en kabel med bara 2 trådar som du ansluter till en 2 x 25Amp "Sabertooth" motoreffekt controller. I grund och botten ett komplett nytt vamp av styrsystemet, vilket gör det enklare att bygga på samma gång.
Jag har försökt att göra det så lätt och särskilt icke-förvirrande som möjligt att bygga.
Obs December 2013: Även dessa blir sällsynt nu men jag har bara hittat "Grove" serien av analoga sensorer från Seedstudio och lagt till kontaktuppgifter till sidan 6.
Obs (mars 2014): Jag har äntligen gjort något som liknar detta att faktiskt fungerar med en modern DIGITAL IMU från Sparkfun, 6dof sensorn, koden nr: SEN-10121. Det har dess egna nya Instructable här:
Observera (December 2014): Jag har också gjort en Instructable med den samma digital Sparkfun IMU i en självbalanserande skoter. Detta instructable är mest aktuella och har elschema och senaste koden här:
Jag har tagit med grunderna i hur du ansluter det till Sabertooth motoreffekt controller, som är en av hylla kommersiella roboten power controller, hur makten Sabertooth och hur du ansluter motorerna till det. En riktigt detaljerad förklaring av den mekaniska sidan av byggande, ta en titt på min ursprungliga Instructable 2010, länkade överst i denna inledning sida.
En gyro används för att balansera (kompletterande filter med en accelerometer). En annan gyrot mäter rotationshastighet sido (t.ex. När styrning).
Detta ger en annan användbar funktion gratis; När du kör i en rak linje, om den upptäcker rotation snabbare än 10 grader per sekund sido, ändras den makten till motorerna att motstå denna effekt. Till exempel motorerna har ofta olika friktion så när du sakta stannar, man slutar innan den andra och du knoppa av. Den här funktionen slutar att så sker, och innebär hjulen monteras ganska nära varandra.
Se denna video http://www.youtube.com/watch?v=FEaTxahyQxc och du kommer se detta händer på 0.51 mins, det extra gyrot används för att minska denna effekt.
Obs: Lagt till 15/03/14. För dem som kan hantera att ha en av gamla, inte längre tillgängliga, Sparkfun 5dof analog IMU'S, har jag bara bifogat samma kod som skrivits i detta Instructable för den kinesiska IMU, öka 30 men med fördelar förändrats för gyrot som passar den gamla 5dof analog Sparkfun IMU.
Huvudsakliga delar lista
www.Maplin.com artikelnummer GBP US$
N39KR RockerSwitch 2.39 3.62
N39KR RockerSwitch 2.39 3.62
GW72P mikrobrytare med spaken 2,49 3.77
FH04E Sub-Min Vippbrytare 2,79 4,23
Projektet Box 3.79 5.74
XR27E 9 sätt flerledarkabel 5.14 7.79
2 skärmad kabel med 0,99 1,50
N30KU Arduino Uno 24,99 37.86
N35KU Arduino protoshield 14,99 22,71
5DOF analog IMU 17.81 26,99
Obs: lista med säljare av detta uppdateras augusti 25 2013 (se steg 6 för listan)
4 x leds 2,56 3,88
_________________________________________________________
80.33 121.71
Videoklipp
Video av senaste Self balancing skateboard i aktion med denna IMU och kod

Self balancing one wheeled electric skateboard

2-wheel Self Balancing Robot med hjälp av Arduino och MPU6050

Anpassade Arduino Shield och sensorer

En Arduino Shield som omvandlar din Radio styrd bil till en Robot

Öppna EVSE Arduino Shield

Sous-vide Arduino Shield

Digital potentiometrar Arduino Shield

Set av brödunderläggen anpassade Arduino Shield

Ledde Dice Arduino Shield
Hur man använder och Arduino shield med Raspberry Pi

Stripboard Arduino shield för att programmera ATtiny45 och ATtiny85

Bygga och använda en MOSFET Arduino Shield

CNC Arduino Shield (PCB)

Bygga en Arduino Shield för nRF24L01 + sändtagaren
Arduino Shield Tips av LOG

Utforma en enkel arduino shield

Billiga anpassad Arduino Shield

LWJM 3 x 3 x 3 ledde kub arduino shield
