Själv balansera upp och ned pendel (4 / 9 steg)
Steg 4: MPU6050 3 axel Gyro och Accelerometer

Vad vi behöver är en signal som är proportionell mot vinkeln på tilt - som Y-axeln i programvaran och denna Gyro när det sitter platt. Jag rekommenderar återigen inte bara hoppa till den slutliga lösningen jag har, testa Gyro på egen hand först och titta på den seriella porten vad vinkeln är som du luta den fram och tillbaka (med ingen motordrift). så du måste använda programmet från denna länk av Jeff Rowberg som skrev drivrutinen
https://github.com/jrowberg/i2cdevlib/BLOB/Master/...
Du måste också använda sitt bibliotek (samma länk). Om hans program inte kompilera har inte sedan du fått sitt bibliotek
i2cdevlib installerat på Arduino. Du kan hämta den från detta indestructible
När du kör testprogrammet kan du mycket väl se att när pendeln är på 90 grader vertikalt som vinkeln uppvägs av säga något upp till +/-10 grader!! Detta varierar från enhet till enhet (jag är benägen att tro) och det är varför jag satte en trim pott på den slutliga utformningen.
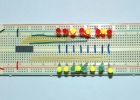
Ledningarna för MPU6050 Gyro är enkelt
Ansluta VCC och Gnd till 3.3V och slipat av Arduino (inte 5V!)
ansluta Int (avbrott) pin till Arduino Pin 2
ansluta SCL och XDA till motsvarande samma bokstäverna stiften på Arduino. Detta är för i2c bussen.
De andra stiften används inte.
Jag monterade gyrot på en liten plastbit via två små skruvar (hål redan borras på enheten naturligtvis). Jag använde sedan en limpistol för att limma församlingen att hjulet chassit. Här är testprogrammet för gyrot. Det inte driva motorerna, bara använda den för att testa. Använd den seriella bildskärmen på Arduino för att se Gyro utgångar.
------------------------------------------------------------------------------------------------------------------
I2C enheten klass (I2Cdev) demonstration Arduino skiss för MPU6050 klass med DMP (MotionApps v2.0)
6/21/2012 av Jeff Rowberg
Uppdateringar (förhoppningsvis) bör alltid finns på https://github.com/jrowberg/i2cdevlib
Ändringsloggen:
2013-05-08 - La sömlös Fastwire stöd
-Tillagd anmärkning om gyro kalibrering
2012-06-21 - lagt anteckning om Arduino 1.0.1 + Leonardo kompatibilitet fel
2012-06-20 - förbättrad FIFO overflow hantering och förenklade Läs process
2012-06-19 - helt ordnas DMP initieringskod och förenkling
2012-06-13 - dra gyro och accel data från FIFO paket istället för att läsa direkt
2012-06-09 - fixa trasiga FIFO Läs sekvens och ändra avbrott upptäckt till RESNING
2012-06-05 - Lägg till allvar-kompenseras första referens ram acceleration output
-lägga till 3D math helper fil till DMP6 exempel skiss
-lägga till Euler utgång och Yaw/Pitch/rulle utdataformat
2012-06-04 - ta bort accel offset clearing för bättre resultat (tack Sungon Lee)
2012-06-01 - fast gyro känslighet vara 2000 grader per sekund istället för 250
2012-05-30 - grundläggande DMP initiering arbetar
/* ============================================
I2Cdev enhet bibliotek koden placeras under MIT license
Copyright (c) 2012 Jeff Rowberg
Tillstånd beviljas härmed, gratis, till någon person att erhålla en kopia
för denna programvara och tillhörande dokumentationsfiler ("programvaran"), att hantera
i programvaran utan begränsningar, inklusive utan begränsning rättigheter
för att använda, kopiera, ändra, sammanfoga, publicera, distribuera, underlicensiera eller sälja
kopior av programvaran, och att tillåta personer som programvaran är
inredda för att göra det, på följande villkor:
Ovanstående copyrightmeddelande och detta tillstånd tillkännagivande skall ingå i
alla kopior eller betydande delar av programvaran.
PROGRAMVARAN TILLHANDAHÅLLS "I BEFINTLIGT SKICK", UTAN GARANTIER AV NÅGOT SLAG, UTTRYCKLIGA ELLER
UNDERFÖRSTÅDDA, INKLUSIVE MEN INTE BEGRÄNSAT TILL GARANTIER OM SÄLJBARHET,
LÄMPLIGHET FÖR ETT VISST ÄNDAMÅL OCH ICKE-INTRÅNG. UNDER INGA OMSTÄNDIGHETER SKALL DEN
FÖRFATTARE ELLER UPPHOVSRÄTTSINNEHAVARE HÅLLAS ANSVARIGA FÖR EVENTUELLA ANSPRÅK, SKADOR ELLER ANDRA
ANSVAR, VARE SIG I EN ÅTGÄRD AV KONTRAKTET, KRÄNKNING ELLER ANNAT, SOM UPPSTÅR FRÅN,
AV ELLER I SAMBAND MED PROGRAMVARAN ELLER ANVÄNDNING ELLER ANDRA KONTAKTER I
PROGRAMVARAN.
===============================================
*
/ I2Cdev och MPU6050 måste installeras som bibliotek, eller annars .cpp/.h filer
för båda klasserna måste inkludera sökvägen till ditt projekt
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include "MPU6050.h" / / inte nödvändigt om du använder MotionApps include-filen
Arduino tråd bibliotek krävs om I2Cdev I2CDEV_ARDUINO_WIRE genomförande
används i I2Cdev.h
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
klass standard I2C adressen är 0x68
specifika I2C adresser kan skickas som en parameter här
AD0 låg = 0x68 (standard för SparkFun breakout och InvenSense utvärderingskort)
AD0 hög = 0x69
MPU6050 mpu;
MPU6050 mpu(0x69); <--använda för AD0 hög
/* =========================================================================
Obs: förutom anslutning 3.3V, GND, SDA och SCL, denna skiss
beror på MPU-6050 INT stift att vara ansluten till Arduinoen
yttre mellanjobb #0 pin. På Arduino Uno och Mega 2560 är detta
Digital i/o pin 2.
* ========================================================================= *
* =========================================================================
Obs: Arduino v1.0.1 med Leonardo styrelsen genererar ett kompileringsfel
När du använder Serial.write (buf, len). Tekanna utdata använder denna metod.
Lösningen kräver en ändring till Arduino USBAPI.h filen, som
är lyckligtvis enkel, men irriterande. Detta kommer att fastställas i nästa IDE
släpp. För mer info, se dessa länkar:
http://Arduino.cc/forum/index.php/topic, 109987.0.h...
http://code.Google.com/p/Arduino/Issues/detail?ID=...
* ========================================================================= */
avkommentera "OUTPUT_READABLE_QUATERNION" om du vill se den faktiska
quaternion komponenter i en [w, x, y, z] format (inte bäst för tolkning
på en avlägsen värd som bearbetning eller något men)
#define OUTPUT_READABLE_QUATERNION
avkommentera "OUTPUT_READABLE_EULER" om du vill se Euler vinklar
(i grader) beräknat från quaternions kommer från FIFO.
Observera att Euler vinklar lider gimbal lock (för mer information, se
http://en.wikipedia.org/wiki/Gimbal_lock)
#define OUTPUT_READABLE_EULER
avkommentera "OUTPUT_READABLE_YAWPITCHROLL" om du vill se yaw
/ pitch/rulle vinklar (i grader) beräknas från quaternions kommer
från FIFO. Observera detta också krävs gravitationen vector beräkningar.
Observera också att gir/pitch/rulle vinklar lider gimbal lock (för
Mer info, se: http://en.wikipedia.org/wiki/Gimbal_lock)
#define OUTPUT_READABLE_YAWPITCHROLL
avkommentera "OUTPUT_READABLE_REALACCEL" om du vill se acceleration
komponenter med gravitation bort. Denna acceleration referensram är
inte kompenseras för orientering, så + X är alltid + X enligt till den
sensor, bara utan effekterna av allvar. Om du vill att acceleration
ersättning för orientering, oss OUTPUT_READABLE_WORLDACCEL i stället.
#define OUTPUT_READABLE_REALACCEL
avkommentera "OUTPUT_READABLE_WORLDACCEL" om du vill se acceleration
komponenter med gravitation bort och justerat för världen ram
Referens (gir är i förhållande till inledande orientering, sedan ingen magnetometer
Det finns i detta fall). Kan vara ganska händig i vissa fall.
#define OUTPUT_READABLE_WORLDACCEL
avkommentera "OUTPUT_TEAPOT" om du vill att utmatningen som matchar den
format som används för InvenSense tekanna demo
#define OUTPUT_TEAPOT
#define LED_PIN 13 / / (Arduino är 13, Teensy är 11, Teensy ++ är 6)
bool blinkState = false;
MPU kontroll/status vars
bool dmpReady = false; Ange sant om DMP init var framgångsrik
uint8_t mpuIntStatus; innehar faktiska interrupt status byte från MPU
uint8_t devStatus; returstatus efter varje enhet operation (0 = framgång,! 0 = fel)
uint16_t packetSize; förväntat DMP paketstorlek (standard är 42 bytes)
uint16_t fifoCount; räkning av alla byte i FIFO
uint8_t fifoBuffer [64]; FIFO lagring buffert
läggning/rörelse vars
Quaternion q; [w, x, y, z] quaternion behållare
VectorInt16 aa; [x, y, z] accel sensor mätningar
VectorInt16 aaReal; [x, y, z] gravity-fri accel sensor mätningar
VectorInt16 aaWorld; [x, y, z] världen-frame accel sensor mätningar
VectorFloat allvar; [x, y, z] gravity vektor
flyta euler [3]. [psi, theta, phi] Euler vinkel behållare
float ypr [3]. [yaw, pitch, rulla] gir/pitch/rulle behållare och allvar vektor
paketstruktur för InvenSense tekanna demo
uint8_t teapotPacket [14] = {'$', 0x02, 0,0 0,0, 0,0, 0,0, 0x00, 0x00, "\r", "\n"};
// ================================================================
=== AVBROTT UPPTÄCKT RUTIN ===
// ================================================================
flyktiga bool mpuInterrupt = false; Anger om MPU avbryta pin har gått hög
void dmpDataReady() {
mpuInterrupt = sant;
}
// ================================================================
=== INITIAL SETUP ===
// ================================================================
void setup() {
gå med I2C bussen (I2Cdev bibliotek inte gör detta automatiskt)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.BEGIN();
TWBR = 24. 400kHz I2C klocka (200kHz om CPU är 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::Setup (400, true);
#endif
initiera seriell kommunikation
(115200 valt eftersom det krävs för tekanna Demo utgång, men det har
verkligen upp till dig beroende på ditt projekt)
Serial.BEGIN(115200);
tag (!. Seriell); vänta på Leonardo uppräkning, andra fortsätta omedelbart
Obs: 8MHz eller långsammare värd processorer, som Teensy @ 3,3 v eller Ardunio
Pro Mini kör på 3.3V, kan inte hantera detta överföringshastighet på ett tillförlitligt sätt tack vare
baud tidpunkten att vara alltför dåligt med processor fästingar. Du måste använda
38400 eller långsammare i dessa fall, eller använda någon form av extern separat
Crystal lösning för UART timern.
initiera enheten
Serial.println F ("initierar I2C enheter...").
MPU.Initialize();
Kontrollera anslutning
Serial.println F ("Testing enhetsanslutningar...").
Serial.println(MPU.testConnection()? F("MPU6050 Connection successful"): F ("MPU6050 anslutning misslyckades"));
vänta för klar
Serial.println (F ("\nSend någon karaktär att börja DMP programmering och demo:"));
medan (Serial.available() & & Serial.read()); Tom buffert
tag (!. Serial.available()); vänta på data
medan (Serial.available() & & Serial.read()); Tom buffert igen
Ladda och konfigurera DMP
Serial.println F ("initierar DMP...").
devStatus = mpu.dmpInitialize();
lämna din egen gyro förskjutningar här, skalas för min känslighet
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); 1688 fabriksinställningarna för mitt test chip
se till att det fungerade (returnerar 0 om så är fallet)
om (devStatus == 0) {
slå på DMP, nu när den är klar
Serial.println F ("Aktivera DMP...").
mpu.setDMPEnabled(true);
Aktivera Arduino avbrott upptäckt
Serial.println (F ("Aktivera avbryta upptäckt (Arduino externa avbrott 0)..."));
attachInterrupt (0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
ställa vår DMP redo flagga så funktionen huvudsakliga loop() vet att det är okej att använda det
Serial.println (F "(DMP redo! Väntar på första avbrott..."));
dmpReady = sant;
få förväntade DMP paketstorlek för senare jämförelse
packetSize = mpu.dmpGetFIFOPacketSize();
} annat {
FEL!
1 = första minne ladda misslyckades
2 = DMP konfiguration uppdateringar misslyckades
(om det kommer att bryta, oftast koden kommer att vara 1)
Serial.Print (F ("DMP initialisering misslyckades (kod"));
Serial.Print(devStatus);
Serial.println(F(")"));
}
Konfigurera LED för utdata
pinMode (LED_PIN, OUTPUT);
}
// ================================================================
=== MAIN PROGRAM LOOP ===
// ================================================================
void loop() {
om programmering misslyckades, försök inte att göra något
om (! dmpReady) återvända;
vänta på MPU avbrott eller extra paket togs tillgängliga
medan (! mpuInterrupt & & fifoCount < packetSize) {
andra program beteende grejer här
// .
// .
// .
Om du är riktigt paranoid kan du testa ofta mellan andra
saker för att se om mpuInterrupt är sant, och i så fall "break;" från den
While() slinga att omedelbart behandla MPU uppgifterna
// .
// .
// .
}
återställa avbrott flagga och få INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
få aktuella FIFO räkna
fifoCount = mpu.getFIFOCount();
check för overflow (detta skulle aldrig hända om inte vår kod är alltför ineffektiva)
om ((mpuIntStatus & 0x10) || fifoCount == 1024) {
Återställ så vi kan fortsätta renlig
mpu.resetFIFO();
Serial.println F ("FIFO overflow!").
annars kolla för DMP data redo avbrott (detta bör ske ofta)
} else om (mpuIntStatus & 0x02) {
vänta på rätt tillgänglig datalängd, bör vara en mycket kort vänta
medan (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
läsa ett paket från FIFO
mpu.getFIFOBytes (fifoBuffer, packetSize);
spåra FIFO räkningen här om det finns > 1 packet
(detta låter oss omedelbart Läs mer utan att invänta ett avbrott)
fifoCount-= packetSize;
#ifdef OUTPUT_READABLE_QUATERNION
Visa quaternion värden i lätt matrisform: w x y z
mpu.dmpGetQuaternion (& q, fifoBuffer);
Serial.Print("quat\t");
Serial.Print(q.w);
Serial.Print("\t");
Serial.Print(q.x);
Serial.Print("\t");
Serial.Print(q.y);
Serial.Print("\t");
Serial.println(q.z);
#endif
#ifdef OUTPUT_READABLE_EULER
Visa Euler vinklar i grader
mpu.dmpGetQuaternion (& q, fifoBuffer);
mpu.dmpGetEuler (euler, & q);
Serial.Print("euler\t");
Serial.Print (euler [0] * 180/M_PI);
Serial.Print("\t");
Serial.Print (euler [1] * 180/M_PI);
Serial.Print("\t");
Serial.println (euler [2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_YAWPITCHROLL
Visa Euler vinklar i grader
mpu.dmpGetQuaternion (& q, fifoBuffer);
mpu.dmpGetGravity (& gravitation, & q);
mpu.dmpGetYawPitchRoll (ypr, & q & gravitation);
Serial.Print("ypr\t")
Serial.Print (ypr [0] * 180/M_PI);
Serial.Print("\t");
/////////////////////////////////////////////////////////////////////////////////////////
/ Detta är Gyro vinkel ypr [1], vi använder här en för pendeln vagnen och konvertera till grader i raden nedan.
se till att du får nära noll när vagnen är vertical.b n
Serial.Print (ypr [1] * 180/M_PI);
Serial.Print("\t");
//////////////////////////////////////////////////////////////////////////////////////////////////////////
Serial.println (ypr [2] * 180/M_PI);
#endif
#ifdef OUTPUT_READABLE_REALACCEL
Visa verkliga acceleration, justeras för att ta bort allvar
mpu.dmpGetQuaternion (& q, fifoBuffer);
mpu.dmpGetAccel (& aa, fifoBuffer);
mpu.dmpGetGravity (& gravitation, & q);
mpu.dmpGetLinearAccel (& aaReal, & Axelsson, & gravitation);
Serial.Print("areal\t");
Serial.Print(aaReal.x);
Serial.Print("\t");
Serial.Print(aaReal.y);
Serial.Print("\t");
Serial.println(aaReal.z);
#endif
#ifdef OUTPUT_READABLE_WORLDACCEL
Visa första värld-frame acceleration, justeras för att ta bort allvar
och roterade baserat på kända orientering från quaternion
mpu.dmpGetQuaternion (& q, fifoBuffer);
mpu.dmpGetAccel (& aa, fifoBuffer);
mpu.dmpGetGravity (& gravitation, & q);
mpu.dmpGetLinearAccel (& aaReal, & Axelsson, & gravitation);
mpu.dmpGetLinearAccelInWorld (& aaWorld, & aaReal, & q);
Serial.Print("aworld\t");
Serial.Print(aaWorld.x);
Serial.Print("\t");
Serial.Print(aaWorld.y);
Serial.Print("\t");
Serial.println(aaWorld.z);
#endif
#ifdef OUTPUT_TEAPOT
Visa quaternion värden i InvenSense tekanna demo format:
teapotPacket [2] = fifoBuffer [0];
teapotPacket [3] = fifoBuffer [1].
teapotPacket [4] = fifoBuffer [4].
teapotPacket [5] = fifoBuffer [5].
teapotPacket [6] = fifoBuffer [8].
teapotPacket [7] = fifoBuffer [9].
teapotPacket [8] = fifoBuffer [12].
teapotPacket [9] = fifoBuffer [13].
Serial.write (teapotPacket, 14);
teapotPacket [11] ++; packetCount, loopar på 0xFF med flit
#endif
blinka LED att ange aktivitet
blinkState =! blinkState;
digitalWrite (LED_PIN, blinkState);
}
}

"Upp och ned pil spets Fighter" pappersflygplan

Dubbel hinken upp och ner tomat

Upp och ner mjölk kannan Planter

Den heliga treenigheten av läskiga ansikten i Photoshop: halv, inga ansikten, och upp och ner ansikten

Orange upp och ner kaka i mikrovågsugn

Upp och upp - Robot balansera Revisited

IR-styrda PC Power ON och OFF och projektorn skärmen upp och ner

Lastpall soffbord med lyft upp och landningsställ

Upp och ner ananas RoboCake

Upp och ner kaka

Driva upp och klappa träning

Arduino få upp och flytta
ATtiny84 binärt motverka, upp och ner

Bär upp och ner kaka recept | Hur göra | Matlagning med Benji

Upp och ner skärmen på Mac OS X Snow Leopard

Ananas-mandel upp och ner... Cookies!

Ananas upp och ner cupcakes

Karamelliserad upp och ner Pear Tart
