DIY Multipurpose Robot (Sumobot, Spybot, Mazebot, Bluetooth...) (2 / 12 steg)
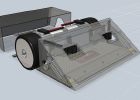
Steg 2: Designa din ROBOT pt1





Vi börjar först om med motorerna och hur många kommer du att använda för din robot? 2WD 4WD SPÅRAS?. I världen av robotteknik inriktade motorer används hela tiden eftersom det förpackningar tilld av makt. För att göra det enkelt att göra en multipurpose robot kommer du att behöva en väl balanserad och pålitlig motor som har mer än tillräckligt vridmoment och varvtal. Så jag bestämde mig att välja pololu 19:1 växellådan i 2WD konfiguration jag vet 2wd kanske inte riktigt multipurpose men det är allt jag har just nu så det är upp till dig att designa din egen lilla 4wd robot eller något bekvämt att man kan säga en riktig multipurpose robot.
TIPS ~
Enligt min erfarenhet att delta konkurrensen om du vill ha exakta rörelser vill du långsammare motorer eftersom snabbare ettor tenderar att flytta sin ståndpunkt på grund av trögheten när roboten är igång.
Förhållandet mellan ordlista:
Vridmoment = ger en hög uteffekt. (ex. En lastbil behöver högt vridmoment när klättra uppför en backe med en tung belastning "1: a växel")
Hastighet = The RPM rating, snabbhet av ett objekt (ex. På en plan yta behöver racerbilar en massa fart för att fånga upp "7: e växel")
När du använder samma motor setup, har high-torque växellådor en lägre hastigheter, medan snabba växellådor har lägre vridmoment.

DIY RC Android Sumobot (Sumo Robot)

DIY RC Robot med din Android telefon handledning Del1: från Android telefon till mikrokontroller

DIY Instructables Robot iPhone Case
DIY $200 Robotic Hand - Arduino projekt
DIY Lizylotte Robot Arm Robotic Rita ram med 2 Stepper Motor
Mainan Anak-Robot Laba Larsson - bygga DIY Spider Robot
DIY RC Robot med din Android telefon handledning del 2: Bluetooth/Microcontroller delar & ledningar
3D tryckt Sumobot [autonom RC, Bluetooth Multiplayer]

[DIY] Spider Robot (Quad robot, fyrfotingen)

Sparky Jr. - DIY Telepresence Robot

DIY universell Robot Gripper
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt

[DIY] Spider Robot - del II - Remote control

DIY Custom Robot däck tillverkade av Sugru
DIY Solar Robotic dubbla 55 Gallon kompostorn

DIY multipurpose bärbara

DIY Minion robot med skrot och Arduino
Sparky - DIY Telepresence Robot
