Elektronisk hund (laser efter robot) (9 / 9 steg)
Steg 9: Konstruera Setup







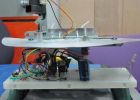
När Arduino, switchen, och styrelsen är ansluten, placera Arduino i fallet. Använda tråd till 7,5 V tråd switch ingång till den positiva änden av batteriet och Anslut den positiva änden av 9 V-batteriet till Vin switch ingång. Marken för 9 V-batteriet kan placeras i den andra mark kortplatsen i Arduino och batteri pack marken kan skall lödas till raden marken på styrelsen. Slutligen, löda peg 3 till rätt motorns svarta kabeln och peg 6 till rätt motorns röda tråd. Löda peg 14 till vänstra motorns svarta kabeln och peg 11 till vänstra motorns röda tråd.
Växeln kan sedan placeras i topp 3d tryckta pjäsen tillsammans med lysdioder, så det kan täcka ledningarna. Den översta fotodiod ska komma ut på baksidan av detta och passa tätt innanför konen. Bakst då bilder på plats. Skjut en av de första bitarna på plats och passa den ordentlig fotodiod på plats. Sedan, delvis Skjut nästa pjäs i så fotodioderna som kan passa in i den. När de är lämpliga, Skjut det hela vägen för att passa ordentligt med Arduino fästet. Vi omfattas sedan kottarna holding fotodioderna med ett lager aluminiumfolie att hjälpa ljus träffar dem mer effektivt.
Detta avslutar processen för att skapa en elektronisk hund.

En enkel och billig DIY raden efter robot

ActoBitty raden efter Robot

Raden efter Robot

Hur man gör ett objekt efter robot - stalkerbot

Världens enklaste linje efter Robot

BOE Bot/Arduino raden efter robot

Hur man gör en linje efter Robot

LINUS: Raden efter robot
Väggen efter Robot med 555 Timer

Arduino ljus efter Robot

Arduino kontrollerade raden efter Robot

Linje & väggen efter Robot

Arduino ljus efter Robot och undvika

Grundläggande raden efter Robot med Arduino

Linje efter robot med PID algoritm

Extremt enkel linje efter Robot med Arduino

Vägen efter Robot "Tweety BOT"

Enkla ljus efter Robot
