En Servo-baserade 4-benta Walker (1 / 11 steg)
Steg 1: Samla delar, mäta, planera lite

Reservdelslista:
2 x Tower Hobbies TS-53 servon
20 in tunga koppartråd: 12 in för främre ben, 8 in för bakre. Jag hade 10-gauge. 12-gauge bör fungera, men jag gissar.
Batteriet är en 3.6V NiMH som sålde för billiga online.
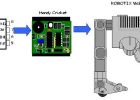
Mikrokontroller hjärnan är en AVR ATMega 8.
Ram är Sintra, som är hella cool. Det är en plast foamboard som böjer sig när du Värm i kokande vatten. Du kan klippa det, borra det, matte-kniv det, och sedan böja det till formen. Jag fick min på Solarbotics.
Andra delar:
Borrade projektstyrelsen för kretsen
Snap-off headers (hane och hona) för de servo och batteri anslutningarna
En 28-pin uttag för ATMega
Super-duper lim
Lödkolv och löd, wire
Några små skruvar för att hålla motorerna på
Drill
Matt kniv
Här ser du mig mäta ut delarna, att göra en skiss för ramen och sedan greppa en linjal för att göra papper mall. Jag använde mallen som en guide för att markera med en penna där jag skulle borra hål i Sintra.

Mobile Robotics med repa: bygga en Arduino-baserad insekt-liknande Walker och programmera den med Scratch

Servo baserade dual axis solar tracker

Hur till göra en enkel två benta walking robot

Tvåbent walking robot

FOBO tvåbent walking robot

Walking Robot prototyp
Bygga en Mini-Walking Bot

BoB tvåbent

Bygga en Actobotics fyrfotingen Robot

Papp Robot

BoB och TED inspirerade Ullu
Stewart plattform

Halloween talande skalle med animerade ögon

PcDuino Crowdsource Kiosk

Bygga en liten Robot: gör världen är minsta hjul Robot med en gripare.

Gör en enkel tvåbent Humanoid Robot (Servo Walking Robot)

SimpleWalker: 4-benta 2-servo walking robot
Två servo walking robot kontrollerad av TI launchpad
