Gest styrda robotarm (4 / 4 steg)
Steg 4: Handske Arduino gränssnitt



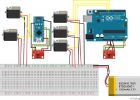
Den 10 stift FRC användes för att ansluta till Arduino wearable som var fastspänd på handleden av den person som kontrollerar handsken.
Stiften på FRC kontakten ansluta IMU och Flex sensorer till I2C och Analog gränssnitt mellan Arduino.
En Bluetooth HC05 ansluter till den Arduino som sänder information om IMU orientering och Flex sensor Bend magnitud via Bluetooth till den robotarm.
Kod för handske-gränssnittet kan vara läst här https://github.com/CuriosityGym/EEZyBotArm/blob/ma...
Se bifogade bilden av schematiskt för handsken.
Instruktioner listade här http://www.technotroniks.com/jugaad/bluetooth-hc-05-to-hc-05-pairing-master-slave/ användes för att koppla ihop de två HC05 enheter så det finns inga Arduino åtgärder krävs för att koppla ihop.

Hur man styr en Arduino styrda robotarm av Dobot teamet
Styrda robotarm med gester

1Sheeld styrda robotarm

Hand gest styrd robot med ljud aktiverat ljus system

Rörelse, styrda robotarm

Joystick styrda robotarm med en Arduino

PS3 styrda robotarm

Interaktiva sökvägen följande robotarm med pfodApp

Fjärrstyrda robotarm (MeArm) med pfodApp

Bluetooth kontrollerad arduino robotarm

DIY protetiska Hand & underarmen (röst kontrollerat)

Några av mina projekt

1Sheeld kontrolleras Arduino fordon

Fånga rörelse med en Arduino Accelerometer w / XBee Comms

Handgesture styrd robot med robotarm

Arm och Hand gest kontroll i Python

En multi kontrollerad hög Precision stationära robotarm

Vifta med handen för att kontroll OWI robotarm... kravlöst
