Gör: it Robotics startkit - analysera LineFollowing.ino Del1 (1 / 2 steg)
Steg 1: Python kommer till undsättning

Om du inte gör det redan, installera Python och skapa readOptical.py program använder din favorit text editor, om du använder Windows, är notepad bra. Skapa en mapp på din dator och placera detta readOptical.py program i den här mappen.
Jag använder Python 2.7, installera den senaste 2.x för Python från bel här är en YouTube video hur till installera Python Python i din väg. Detta är förutsatt att du kör Windows-operativsystem.
För att köra våra program måste vi starta en kommandotolk, (ligger i alla program -> tillbehör-kommandotolken) starta detta programtyp följande kommando i Kommandotolken i fönstret:
Du vill ändra till platsen för mappen där du placerat din readOptical.py program.
På min dator skapade jag mappen C:\Code\Python\readOptical. Så skriver jag in följande kommando vid kommandotolken:
> CD-\Code\Python\ReadOptical
Vi kommer nu att redigera våra readOptical.py program att inkludera sensormätningar som vi skrev ner när vi fångat sensordata. Så användande din favorite text redaktör, redigera readOptical.py och redigera den under linjen att inkludera din sensormätningar.
Vi kommer att köra vår readOptical.py två gånger,
En gång med data från våra sensorer för när båda sensorerna är vit och svart vänstra sensorn, och en andra gång med data från våra sensorer när båda sensorerna är vita och rätt sensorn är svart.
Detta sätt kan vi Visa alla readOptical.py program utdata utan några data att vara avskuren från Kommandotolken.
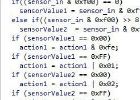
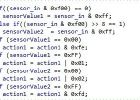
Redigera denna linje i readOptical.py-programmet:
optValues = [0xff, 0x100, 0x00, 0x100, 0xff, 0x100]
Vi har inkluderat sensormätningar från när båda sensorerna är vita, när sensorerna på vänstra sensorn är svart och igen när båda sensorerna är vita. Anledningen till att vi gör detta är att ge dig ett verkligt exempel på vad roboten skulle se som det följer en linje.
Roboten skulle först se båda sensorerna vit (robot gränsöverskridande den svarta linjen) sedan cirkeln svängar roboten skulle se vänstra sensorn blir svart, på roboten blir rätt tills båda sensorerna skulle se vita igen.
(igen jag använder vänster och höger sensorer som jag ser på framsidan av roboten.
Efter redigering våra readOptical.py program skulle vi skriver du följande vid kommandotolken (du borde sitta på din mapp där du sätter din readOptical.py program)
> Python readOptical.py
Vid denna punkt i programmet ska köras och du borde se den följande produktionen i Kommandotolken. Kopiera resultatet och klistra in den i ett annat Windows Notepad fönster, så vi kan titta på detta i en minut.
Om du får fel, redigera din readOptical.py program. Python är känslig för indrag, Python använder blanksteg indrag för att avgöra hur programmet ska bete sig när det utför.
Om du får några indrag fel, ska du gå tillbaka och kontrollera att du klistrat readOptical.py programmet in din text EXITeller, att du inte flytta alla indrag på varje kodrad.
Vårt första program produktionen bör se ut som följande: (bifogad fil)
(titta bara detta över för nu, vi kommer att gräva djupare i lite)
(Se även din produktion, det kommer att formateras så kolumnerna linje upp bättre)
Sensormätningar (där svart remsan sitter) Center vänster Center C:\Code\Python\readOptical\src > python readoptical.py
Gör: it Robotics startkit - analysera LineFollowing.ino del 2
Gör: it Robotics startkit - skicka Sensor Data trådlöst
Gör: it Robotics startkit - förståelse bitvis Math

Gör: it Robotics startkit-trådlös Connectivity

Gör: it Robotics startkit-förare ombord förtrogenhet

Gör: it Robotics Starter Kit fånga Sensor Data

Linje följande Robot med grundläggande PD (proportionell-derivat) kontroll

Grundläggande raden efter Robot med Arduino

FÅ din BOT på: Robotics Hackathon Robot Demo

DIY 4WD bil organ för arduino robotics projekt och RC bilar

Brand startkit

Locutus av Borg kostym (Cyborg) med riktiga robotics, ljus och ljud och 36.000 mAh makt!
Automatiskt beräkna och analysera händelser med Wolfram Data droppa och Prota OS

90 graders Adapter för VexPro VersaPlanetary växellåda för första Robotics

Aerobox - ett mjukt Robotics System

FPGA Robotics Vision för någon
Analysera din Facebook data med Plotly

Analysera en enkel takstol med metoden för lederna
