Robo-Mobile - en hemmagjord Bluetooth Robot (3 / 16 steg)
Steg 3: Chassit




Storlek
När jag började detta projekt visste jag att jag ville ha en liten men stabil robot. Mina kriterier var ganska rakt fram, det skulle vara en stor nog att passa min elektronik, men inte för stor och tung att min micro växelmotorer inte skulle ha tillräckligt vridmoment att köra den. Jag bestämde mig att gå med en 20 x 20 cm plattform.
När jag avslutat skära ut bit plywood, jag markerade hål för parentes och borrade ut dem. Efter en liten lekte runt med en skruvmejsel och nötter, monterade jag min växelmotorer till chassit. Jag var inte kunna hålla tillbaka frestelsen av att fästa hjulen så jag satte dem att få en titt för robot!
Sköld
Som jag sa innan, chassiet av roboten är den enklaste delen av projektet, så efter montering på motorerna, fanns ingenting kvar att göra men att montera elektroniken och få denna robot flyttar! Jag drog ut min dammiga Arduino (som inte har berörts sedan senaste projektet) och den nya Adafruit motorn sköld v2 som var fortfarande bara en påse med delar. Adafruit Arduino sköldar är bra! De är lätt att använda och liten eller ingen felsökning krävs. Den enda nackdelen av Adafruit sköldar är att behöva löda. Jag kan säga att jag är skickliga på lödning och detta var verkligen inte ett problem för mig. Den enda svåra biten var stift/rubriker som var lite närmare varandra, men jag fick ganska bra på detta efter lödning fyra av dessa Adafruit sköldar. (Obs: Adafruit sköldar inte kommer med stapelbara headers. Dessa köps separat.) Jag kommer inte att visa varje och någonsin steg av Adafruit skölden montering eftersom de har en stor steg för steg guide på deras hemsida gör just detta.
Ledningar
När sköld är klart det är dags att ta den i bruk. Jag borrade i några hål i framsidan och baksidan av chassit att få kablarna från motorerna att skölden. Jag kopplade sedan upp min motorer, varje till en port på plintar med vissa wire jag hade liggande. (Ledsen jag har inte mätaren av tråd jag används.) När motorerna var ansluten, mötte jag upp batteriet med ett 9v batteri kick. När ledningarna var redo, jag inkopplad min Arduino i min dator och laddat upp en något modifierad exempel skiss som kom med v2 sköld. Jag modifierade den för att köra 4 motorer och justeras mönstret av automatiserade slingan att testa typ av rörelse. (Framlänges: alla motorer driver framåt. Bakåt: Alla motorer körning bakåt. Vänd/rotera höger: höger motors gå bakåt när vänster motorerna går vidare. Turn/rotate vänster: vänster motors gå bakåt när höger motors rör sig framåt.)
Provning
När skissen klar är uppladdning det dags att driva upp den Arduino strömförsörjning, och låta chassit kör. Se till att alla motorer är på väg i samma riktning under den främre delen av slingan. Det är alltid bra att höja chassit från marken eller hålla den i luften under första körningen sedan vid leder av motorerna är bakåt/vänt, motorn kommer att snurra åt andra hållet att göra chassit låsa upp när motors flyttar i alla olika riktningar. Som jag nämnde ovan, om motorerna är bakåt bara knäppa leads på en av motorerna eller motor sköld. Efter att se till framåt funktion fungerar ordentligt se till att du är mark riktning framåt eftersom chassit är kvadrat och vi har ingen möjlighet att identifiering. Glöm inte att kontrollera riktningen av vänster och höger sväng, se till att de gör handla på rätt sätt.
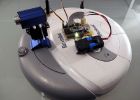
Bluetooth
Efter att kunna flytta roboten autonomously, var det dags att koppla upp min kommunikationsmetod. Jag visste det var Bluetooth på grund av de val jag gjort i början, så jag köpte en Arduino Bluetooth sköld. Skölden jag använde för Bluetooth var Adafruit Bluefruit sköld. Denna sköld var i särklass de enklaste Bluetooth-lösningarna för Arduino. Även om skölden kommer som byggsats som den motoriska shield, behöver det inte någon AT-kommandon eller någon av de hårda kalibrera för att använda denna sköld. Allt du behöver göra är att starta upp och ansluta med en Bluetooth-enhet. (Senare för robotarm, jag kommer att använda HC-05 eftersom denna sköld var inte kunna använda som en mästare, kontrollanten.) Så efter lödning och montering var klar, jag inkopplad min ovanpå min motor sköld som var på min Arduino shield, börjar jag verkligen stapla sköldar. Slutligen, jag kopplar min Arduino tillbaka i datorn för att ladda upp en ny skiss, en som innehåller Bluetooth shield's uppsättning upp kod finns med Adafruit medel. Nu är det dags att göra detta chassi - remote kontrolleras.

Pipe-Bot - en smart arduino bluetooth robot

Robo-HEJARE - 3lb bekämpa Robot

PC kontrollerade Bluetooth Robot (med ett GUI!)

Bluetooth Robot med dator gränssnitt

Mobil drivs arduino Uno robot med hjälp av DTMF

Bluetooth Robot... Fast, cheap and reusable

Mobil Sun-söker Robot

Robocam - hemmagjord Video Robot

Göra en hemmagjord Bluetooth-högtalare

Gest kontroll car(robot) med Arduino och Android(bluetooth)

Bygga en Bluetooth Teddy Ruxpin Robot

Hur man gör en cool android/pc kontrollerade bluetooth arduino robot under $34/Rs.2300

Arduino Robot för lägsta kostnad

Mini robot ett Arduino

HackerBoxes 0001: Robotic Smart Car, NodeMCU, 3D LED-julgran
Bluetooth din iRobot Roomba!

Bärbar Bluetooth-högtalare

HackerBoxes 0005: LED pixlar, 2D matris, 4 x 4 x 4 kub och Bluetooth
