Autonoma Miniquad (programvara) (5 / 9 steg)
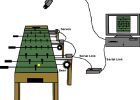
Steg 5: Batteri bildskärmskalibrering




För detta steg behöver du en multimeter och 2 alligator-klippt trådarna.
Om du inte har tillgång till en, du kan prova att använda mina inställningar, men se upp de kanske inte är korrekta för dig och din quad kan falla från himlen förtidigt.
Ta bort propellrar om du inte redan har.
Vad vi behöver göra nu är kalibrera spänning och ström mäts av batteri monitor.
Innan vi börjar, använda en multimeter för att mäta spänningen över batteriets positiva och negativa terminaler. För en 3 cell ackumulatorn, bör detta vara mellan 9v och 12.4v, beroende på kostnad. Skriv ner detta nummer.
Det blir enklare om du har en bare-slutade XT60 hona, men inte omöjligt utan den. Anslut kontakten till miniquad och klämma alligator clips till den.
Fäst den andra änden av den negativa kabeln till den negativa sidan av batteriet. Från denna punkt på, var extremt försiktig att inga sladdar flytta och röra varandra. Böja bare-slutade trådarna från varandra och hålla dessa alligator clips separerade.
De flesta multimetrar har 3 pluggar för 2 sonder. En är positiva, och de andra två är där du sätter marken sonden beroende på vad du vill göra. En kommer att vara för spänningsmatning och ma strömmätning och den andra kommer att vara smält för amp-skala strömmätning. Plug svarta söka in förstärkaren (det kan säga 10A eller något) selector och slå på multimeter, byta det till ström (ampere) mätning läge.
Slå på din sändare och klämma den återstående snabbkontakt anslutningsklämma till svart sonden av multimeter.
Att säkerställa att ingen ren metall är rörande allt som kommer att skapa en kort, sticka röda multimetern sonden till den positiva Polen på batteriet.
Miniquad startar och multimeter bör registrera om 0.4A.
Anslut till flygplanet med uppdrag Planner och navigera till fliken 'Initial Setup' och välj 'Batteri Monitor'.
Använda nedrullningsbara rutorna för att ange följande inställningar:
Monitor: Spänning och ström
Sensor: andra
APM Ver: APM2.5 + - 3 DR Power Monitor
Nu måste du ange två siffror.
1. uppmätt batterispänning: Ange spänningen mätt innan
4. uppmätt ström: Ange den nuvarande som multimeter visar. Att säkerställa propellrar är inte på, beväpna flygplanet genom att trycka på sändarens spjäll stick till nederst vänstra. Ta upp gasen 10% eller 20% och se om ström (Calced) matchar multimeter. Ange den nya aktuella mätt med en multimeter och se om ström (Calced) matchar det när du flyttar gasen någon annanstans.
Du kan nu koppla multimeter och alligator klippen.

Autonoma Miniquad (församlingen)

Autonoma solar driv tweeting fågelbordet

AUTONOMA HOOVER (Intel IOT)
Autonoma fotbollsspel

Autonoma Sentry tornets

Autonoma Solar Robot steg 1

Autonoma Sumo bekämpa Robot med pneumatiska Flipper - hur man

Autonoma drone som du redan har i din ficka!

Autonoma, trådlöst kontrollerade svävare

Autonoma Gripforce stabilisator robotarm

Miniatyr autonoma luftskepp
Autonoma / röst kontrollerat - 3D Scanning rigg för 3D utskrift

DIY Johansson - bara en autonom Robot

SLAM baserade autonoma dammsugare

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Swarmscapers: Autonoma mobila 3D-utskrifter robotar

Autonoma Paintball Sentry Gun

Arduino baserade Robotic Car(wireless controls+Autonomous)
