Autonoma Sentinel Arduino fordon (5 / 9 steg)
Steg 5: Bygga ditt fordon


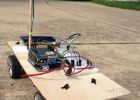
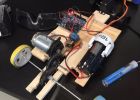
Eftersom detta projekt inte är verkligen särskilda någon fordon plattform, lämnar jag det till dig att bygga din egen bil. Många kit finns, kan du bygga din egen från grunden med hjälp av en annan Instructable eller din kan omplacera en plattform som du redan har.
Du det ultraljuds och IR-sensorer monterade på pan/tilt servo församlingen och vänd framåt så den kan skanna målområdet före Sentinel.
På bilden är min DFRobotShop Rover V2 expansion plattan och sensor sköld.
Den andra framåt inför ultrasonic sensorn är för ett annat projekt, inte används här.
Här är de Stifttilldelningar används av koden som anges i nästa steg. Mer detaljer om dessa finns i koden.
2 PANPIN (servo)
4 RANGEFINDERPIN (ultraljud)
5 MOTORRIGHTSPEED (motor hastighet och riktning)
6 MOTORLEFTSPEED
7 MOTORRIGHTDIREC
8 MOTORLEFTDIREC
9 LASERPIN (cannon)
10 TM1638STBPIN (tillval på display modul)
11 TM1638DTOPIN
12 TM1638CLKPIN
13 IRLEDSPIN (sammansatta IR-lysdioder)
A2 IRRIGHTPIN (sammansatta IR phototransistors)
A3 IRLEFTPIN

Autonoma vägg kramas Arduino fordon

1Sheeld kontrolleras Arduino fordon

AAA Robot (autonoma Analog Arduino)

WiFi / Internet / Android kontrollerade Nerf Vulcan Sentry Gun

Internet kontrollerad Telepresence Robot

1Sheeld styrda robotarm
Arduino Powered autonoma fordon
Arduino autonoma fordon

Autonoma Arduino bil

Swarmbots: Autonoma Arduino bilar som spelar musikaliska stolar

Grunderna i förvandlar ditt Remote Controll fordon till ett autonomt System (Drone) genom att använda en Arduino

CARduino - Arduino-drivna, LabVIEW-kontrollerade fordon

Arduino autonom gräsklippare som CutFlower

Autonoma Arduino bil med infraröd närhets-Sensor

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Autonoma Arduino Rover 5

RC bil till autonoma Arduino Robot

Autonoma Tank med robotarm (Arduino, Bluetooth)
