Autonoma Sentinel Arduino fordon (6 / 9 steg)
Steg 6: Algoritmen


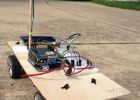
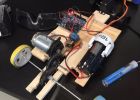
Sentinel står still medan pan servo skannar för mål med lång räckvidd ultraljud sensorn. Panorering uppstår från 0 grader (höger) till 180 grader (vänster), och tillbaka igen.
När ett mål identifieras, fordonet längskraften och servo kastruller i motsatta riktningar tills målet är "direkt ahead". För den medföljande illustrationen, har ett mål upptäckts i 45 grader, så Sentinel kommer att pivotera rätt medan man fortsätter att panorera kvar tills pannan servo vinkeln visar målet att vara någonstans i intervallet 80 till 100 grader.
Då börjar den metoden. Om allt går rätt, kommer det gå vidare tills mer exakt sammansatta IR-sensorn upptäcker målet och ger det i för en "kill shot" när en förutbestämd sträcka har nåtts.
Om målet förloras under denna process (som det ofta är på grund av billiga sensorer oprecisa), stoppar Sentinel och återuppta avsökning. När målet är beläget igen, fortsätter processen som tidigare.
Om Sentinel finner sig för nära till målet, det kommer att dra sig tillbaka tills ett säkert avstånd uppnås.
En video finns senare i detta Instructable att demonstrera alla av denna åtgärd.

Autonoma vägg kramas Arduino fordon

1Sheeld kontrolleras Arduino fordon

AAA Robot (autonoma Analog Arduino)

WiFi / Internet / Android kontrollerade Nerf Vulcan Sentry Gun

Internet kontrollerad Telepresence Robot

1Sheeld styrda robotarm
Arduino Powered autonoma fordon
Arduino autonoma fordon

Autonoma Arduino bil

Swarmbots: Autonoma Arduino bilar som spelar musikaliska stolar

Grunderna i förvandlar ditt Remote Controll fordon till ett autonomt System (Drone) genom att använda en Arduino

CARduino - Arduino-drivna, LabVIEW-kontrollerade fordon

Arduino autonom gräsklippare som CutFlower

Autonoma Arduino bil med infraröd närhets-Sensor

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Autonoma Arduino Rover 5

RC bil till autonoma Arduino Robot

Autonoma Tank med robotarm (Arduino, Bluetooth)
