Bygg en SpurtBot linje efterföljare (18 / 18 steg)
Steg 18:

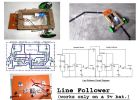
Börja med att testa inuti loop. Ange SpurtBot inuti cirkeln så att det kommer att flytta runt slingan i medurs riktning. När sensorn är på svarten, rätt motorn stannar, och SpurtBot kommer sväng höger. Nu sensorn korsar över till den vita bakgrunden och rätt motorn kommer att snurra snabbare än den vänstra, vrida SpurtBot tillbaka mot den svarta linjen.
Det bör följa linjen som ganska nära, men kan skära några trånga hörn.
Placera SpurtBot på yttre kanten av svarta slingan, inför så det kommer att gå motsols. En gång när sensorn är på svarten, rätt motorn stängs av och SpurtBot börjar vända sig bort från slingan. När den träffar den vita bakgrunden högra motorn snurrar snabbare än vänstern och SpurtBot ska vända tillbaka in mot fodra. Om det följer linjen ganska nära, allt är väl. Om det inte blir ganska fort nog, prova att gå tillbaka till steg 17 och lägga en mer lager av krympslang.
När du lägger till lager, rätt motorn snurrar snabbare, men du är också mindre vridmoment. Om du lägger till för många lager, kanske rätt motorn inte har tillräckligt vridmoment till flytta SpurtBot.
Ha det så kul!

SVART linje efterföljare ROBOT

Baserade Arduino skrivbordet linje efterföljare - jolliBot

Uppgradera Analog linje efterföljare till Arduino med Attiny85

SpurtBot ljus efterföljare-raket varumärke Studios grodyngel

ENKLASTE linje efterföljare

Linje efterföljare Robot utan Arduino eller Microcontroller
Enklaste linje efterföljare Robot

Högpresterande rad efterföljare Robot

Rad efterföljare med msp430g2 launchpad

Hur man bygger en stel spänningskälla med hjälp av en sändare efterföljare

Rad efterföljare Robot - PID Control - Android Setup

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

Gör rad efterföljare robot i 5$

Rad efterföljare utan microcontroller

Hur man gör världens minsta rad efterföljare robot (robo Rizeh)

2pi rad efterföljare

ATtiny13A rad efterföljare

Autonoma rad efterföljare robot
