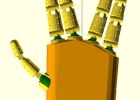
Enkel mekanisk (robotic hand) gjord av kedjan






Detta är mycket liknar:
Jag hade ursprungligen tänkt att bygga detta som länken rekommenderas - men jag hatar lim, tejp och plast. Jag vill ha det svetsade/lödda/skruvas ihop så jag valde vad du ser i bilden.
Tog en hel del tips från den Mythbuster episode-(i efterhand inte nog som det visar sig)
http://www.youtube.com/watch?gl=GB&hl=en-GB&v=phQcTjnmTcw
Jag hade material liggandes i garaget så jag bestämde mig att se vad jag kunde komma på. Jag tillbringade ett par timmar efter arbete i garaget under några nätter & sätta ihop. Ursprungligen var jag planerar på att göra detta ett bevis på konceptet och gör en renare version med mer detaljerade instruktioner men alltför många saker som händer så detta är bäst det kommer att få.
Komponenter
Plåt för hand
# 50 kedja för fingrarna
Kopparrör för kabel guider
Stålvajer för "senor"
½ kvadratmeter stål för tillbaka ramen
1" slang för grepp & finger dra ringar.
3/16 bungee rep för mer "senor"
3/16 kragar att behålla kabeln (från någon anständig hobby butik för RC flygplan)
1/8 stål spö för knogen stannar
Små brickor & ösa tråd
Verktyg som behövs för
Svetsa pack 100 mig svetsare
Gas fackla för lödning koppar guider till stål
Några verktyg för att skära & slipa stålet – (bandsåg, plåt aktre språnget, vinkelslip, bandslip, etc)
OBS #1
Om du märker i Mythbuster video & på min hand använder jag 1/8 stål staven på fingrarna som "hållplatser" för att hålla fingrarna från böjning bakåt. Du måste titta på Mythbuster video flera gånger för att fånga detta. Mythbusters video används också ett "C" formad bit material för detta. Jag gjorde icke ' och detta fick mig lite sorg eftersom jag inte kunde tråd bungee rep under guider witihout bindning. Något som de gjorde i videon och jag har inte fånga den första gången.
OBS #2
Du kan inte ha mer än två leder flytta med denna konfiguration. Det är bara hur det fungerar. På längre fingrar jag ursprungligen försökte detta men hade att inte använda en av de böjar/index i fingrarna. Igen i videon vill du märka två lederna flytta på något finger. Den tummen och lillfingret faktiskt fungerar bäst. Om jag skulle göra en annan taget alla på fingrarna skulle ha två leder.
OBS #3
Friktion är din fiende. Även med en kort en pull som detta är, minimera eventuella bindande och försöka göra den jämnaste rakaste guiden för kablarna som du kan.
OBS #4
Ringar för fingrarna klipptes från vissa stålrör. De är mycket obekväma på fingrarna. Jag skulle föreslå att köpa några stål ringar för att göra jobbet istället.
OBS #5
Jag behöll bungee i spetsen på fingrarna av threading det genom en bricka och använde en bailing tråd för att behålla den. Med hjälp av 3/16 krage är en renare idé. Dessutom dopp/kappa bungee slutar/tips i superlim att härda dem. Fungerar bättre för kragar att bita på bibehållande.
OBS #6
Jag faktiskt soldiered kopparrör till stål. Jag kunde silver löd den men lödning det fungerade bra.
Smälttråd 1/8 tum till #50 kedja med en MIG svetsare är ganska rörigt.
Det finns också bara 4 ringar. Jag hopbundna den tummen och pekfingret. Jag kunde inte göra 5 kabel guider passar.
Svanmärkt mekaniska Robot Hand

Enkel och billig ROBOT HAND med endast en MOTOR!

Robotic Hand kontrolleras av Power Glove

Handske kontrollerade Robotic Hand - billig och enkel Version

Jag gjorde en Robot Hand

Kontrollerbar Robotic Hand med Flex sensorer & servon

Prostetiska/Robotic Hand utskrivbara som en monterad enhet utan stöder

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Ada Robotic Hand - Open Bionics
DIY $200 Robotic Hand - Arduino projekt

Dextrus v1.1 Robotic Hand

En Motor Robotic Hand trummor fingrarna

Hur man bygger en robot Hand med Haptic Feedback

DIY Robotic Hand kontrolleras av en handske och Arduino
Ge dig själv en (Robotic) Hand

Baserade Arduino Moto Racer Spela Robotic Hand

3D utskrift en konstgjord muskel Robot Hand
