Self balancing one wheeled electric skateboard (15 / 28 steg)
Steg 15: styrsystem

Återigen, se min hemsida (länk på sidan 1) för mer info på programvara kontrollprinciper etc.
Den grundläggande tanken är denna:
gyroangledt = mängden tilt från gyro efter att de sista behandlingen
newangle (av tilt från vertical)=(0.99*(oldangle+gyroangledt)) + (0,01 * accelerometerTilt)
Detta ger den nya lutningsvinkel från vertikala. Observera hur 1% av accelerometer signal infogas varje gång med 99% av gyro-derived kortsiktiga vinkel ändras beräkningen. Denna jämnar ut variationer i accelerometer läsning med tiden (genomsnitt ut ljudet så det själv avbryter), långsamt korrigerar alla noll-punkten drift i gyrot men fortfarande tillåter gyro att hantera de omedelbara kortsiktiga förändringarna i tilt.
linearvelocity = linearvelocity + (0.00004 * vinkel)
Detta innebär "är vi fortfarande dricks?" och om så långsamt öka makt motorn. Detta är hur du kontrollera hastigheten manuellt. Om du håller styrelsen kontinuerligt lutar, kommer det att sakta påskynda i riktning du luta den.
Level=((K1*Angle) + (k2 * anglerate) + linearvelocity) * overallgain
"anglerate" är från gyro dvs är de omedelbara kortsiktiga "rate för tippning"
Nivå styr kraften skickas till motor (PWM månadskapacitet).
K1 är ca 4,5
K2 är om 0,5
Overallgain är just det - typ av en "accelerator" knopp på Kontrollpanelen - om set för låg styrelsen känns slarvig, för hög och det svänger vilt!
Slutligen fungerar hela bara eftersom detta program looping ungefär 100 gånger per sekund.

2-wheel Self Balancing Robot med hjälp av Arduino och MPU6050
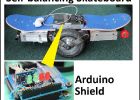
Self balancing skateboard/segw * y projektet Arduino Shield

Electric Skateboard med-wheel motorer

Electric Skateboard v2.0: Smartphone kontrollerade

Electric Skateboard v4.0: The Banana Board

DIY Electric Skateboard (mycket enkelt)
Self balancing Raleigh Chopper inspirerade elektrisk skoter

DIY Electric-Skateboard

Self Balancing Scooter Ver 1.0

Baransu Self balancing skoter

Self Balancing segway style skoter för under 300,00

Self Balancing PT (hemlagad Segway)

Self Balancing gyroskop V3 med hjälp av Arduino och potten för Tilt Sensor

Self Balancing gyroskop på två Inline hjul
Self Balancing gyroskop på två ätpinnar

Lätt bygga själv balansera elektriska skateboard

Göra din egen miniatyr Electric Hub Motor

DIY elektrisk Skateboard
