COG-bränna ben Joint (hållbara Servo) (3 / 4 steg)
Steg 3: Programvara: enkla döda bandet servo kontroll
Programvaran innehåller många av samma funktioner som väja steer fötterna. Det är en enkel seriell meny för att konfigurera servo som lagras i eeprom. Koden gör en enkel döda-band kontroll av Talon motorstyrning. Om softpot är nära den önskade läge motorn är avstängd, och sparar ström. Om sensorn är "förbi" ståndpunkten körs det motorn i omvänd ordning. Om sensor "kort" av den önskade placera den körs motorn fram. Hastigheten på motorn är ett fast värde från eeprom.
Det finns en speciell funktion tillade specifikt för att kalibrera talongen. Detta görs för att synkronisera menande av de servo signalerna mellan talongen och kontroll enhet, i detta fall Arduino Pro Mini. Talongen är callibrated genom att skicka ett extremt låga och mycket höga värde då ett center värde. På Arduino genomförs detta som ett menyalternativ så den enkla användaren trycker på knappen "c" och skicka det till Arduino medan du trycker ett gem i "CAL" knapphålet på talongen. VARNING! Glömmer att trycka på knappen CAL gör servo gå till extrema värden så var snabb att döda makt om motorn rör sig under en kalibrering.
Vart är PID-koden?
Det finns inte någon ännu. Den enklaste sak som möjligen skulle kunna fungera uppmuntrar en design som kan arbeta och testa sedan i verkliga världen att se om det räcker. Vi vet också att vi har andra komponenter.
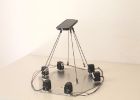
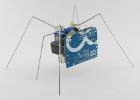
Är intresserade av enkelhet var vi nyfiken om detta enkla förhållningssätt även skulle hålla en stadig position på vår robot. Vi hade ben som individuellt skulle börja att vinka under ingen belastning. Men givet vår uppsättning av fyra ben systemen för anslutna servon verkar stabilare.
Vi planerar att genomföra PID control bara andra funktioner var en prioritet och vi kan stå på benen i timmar under makt och inte skaka isär.

COG-bränna enkel uppfattning Stack

COG-Burn väja Steer fötter

Hur man bygger din egna DARPA Robotics Challenge Final Robot. Verkligen!

Låg rygg pall stol
Stewart plattform

Nio Square stol

Ta din HO skala slot bil spår till nästa nivå billigt

O-fett fyrfotingen roboten med akryl ram

Bygga en Actobotics fyrfotingen Robot

Hur man bygger en MiniBiped robot
Robot skalbagge Ringo

Enkel 18dof Hexapod, Arduino nano (eventuellt med pololu maestro)

R/C replika WW1 tank

Hexapod

Hur man gör en servo ben

Justerbar höjd formica skrivbord med fällbara ben (tillverkad av kryckor).

K'nex stativ med fyra ben - hopfällbar!

Att lägga till HML650 infällbara landningsställ till HK X650F quadcopter
