DIY Johansson - bara en autonom Robot (2 / 14 steg)
Steg 2: Avstånd Sensor - HC-SR04 {biblioteket används - NewPing}


Biblioteket används i detta mål är känd som NewPing av Tim Eckel bara för att göra koden mer enklare att förstå för nybörjare... För dem som vill veta mer om hur funktionen fungerar... har jag också inkluderat en skiss med Detaljer
För mer information om olika funktioner och metoder för NewPing bibliotek vänligen besök:-
http://Playground.Arduino.cc/Code/NewPing#Methods
Mål 1 : - för att lägga till NewPing biblioteket i IDE
Obs :-hoppa över detta mål om du redan vet hur man gör.
Steg 1:-Ladda ner NewPing.zip
Steg 2:-öppna Arduino IDE
Steg 3:-skiss menyn > Importera bibliotek > Lägg till bibliotek
Steg 4:-lokalisera NewPing_v1.5.zip
Steg 5:-Klicka på öppna
Steg 6:-Kolla in filen > exempel > hitta NewPing.. .till bekräfta
Mål 2 : - veta vissa funktioner av biblioteket och spela lite med sensor
Saker som behövs:-
- 1XArduino UNO R3 (eller vad du vill) ansluten till en USB-kabel för att kommunicera med datorn.
- 1XHC-SR04.
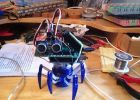
Steg 1 :-bifoga HC-SR04 som visas i bilden
GND---> Gnd
ECHO---> Digital stift 13
Trig---> Digital stift 12
VCC---> Digital stift 11
Steg 2:-
Alternativ 1 :- kopiera koden från HC_SR04 .txt ladda upp det [förstå först, sedan ladda upp]
Alternativ 2: - öppna IDE, gå till arkivera > exempel > NewPing > NewPingExample. Sedan förklarar stift 11 som driver pin, och sedan sätta den till hög på setup() funktion och ändra 'echo' och "trig" pin definition
[Förstå först, sedan ladda upp]
Obs : - välja alternativ 2, dess bättre tror jag, jag nämnde det i föregående steg och jag också gör det nu
Läs kommentarer noga, de beskriver allt [göra detta för varje skiss]
Steg 3:- Öppna den Serial Monitor Ctrl + Skift + M. Lek med din hand en tid
Obs :- om avståndet är > = maximalt avstånd inställt.. .så funktionen ping() returnerar noll
Förslag 1:-Läs filen HCSR04.pdf och länken ovan för bättre förståelse.
Förslag 2:-Kolla in "without_library_HCSR04.txt" filen att veta hur man gör det på ditt sätt utan att använda biblioteket och spara några programminne.

Nybörjare autonom robot (delvis)

Bita hinder autonom Robot «Sanglier» (vildsvin)

MICBot autonom Robot hinder Deviance

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!

Ollie-en DIY autonom robot luftskepp

DIY RC Android Sumobot (Sumo Robot)

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Raspberry Pi Web kontrollerad / autonom Robot

Första någonsin riktiga pepparkakor autonom Robot (overifierad påstående)

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Hemgjord Modern DIY betong Bar
Autonom Robot med LinkitONE

Billig autonom Robot
K-9 The autonom Robot Pet

MJRoBot jag - enkla steg för att bygga en autonom robot.

Bygga en autonom Robot Wall-E

DIY Mod en Omnibot 80 Robot med röst, kamera, servon, Bluetooth