DIY Johansson - bara en autonom Robot (8 / 14 steg)
Steg 8: Johansson - bara en autonom Robot (koncept)





Att få rak på sak
Primära saker krävs:-
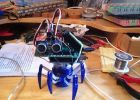
- 1 X chassi med två DC - Motor och hjul (figur 1)
- 2 X Atmegas microconttroller
- 1 x Stepper Motor (28BYJ-48 5V) med en plattform (figur 2)
- 1 X RF-RX och TX modul (figur 3)
- 1 x Arduino Development Board med en Atmega 328 pu mikrokontroller (figur 3)
- 2 X HC-SR04 (figur 3)
- 1 X ULN 2003
Hur allt kommer att fungera:-
- Check ute den 3: e bilden. Detta kommer att vara avsnittet sändare
- The sändaren avsnitt kommer att vara på Stepper Motor-plattformen.
- Nu kan du få en uppfattning om begreppet, yahh du gissat rätt hela plattformen kommer att rotera med Stepper Motor
- Med roterande sändaren Platform skickar trådlösa avståndet data för båda HC-SR04 varje 5.625 grader flyttas från den ursprungliga position som är exakt 64 steg för Stepper Motor
- Denna Stepper går 4096 steg 1 komplett rotation. Varje 64 steg avstånd sensorn kommer att vara pingade (utlöst) och avståndet data kommer att skickas trådlöst till en annan Atmega som fixas till bröd styrelsen
- Så det blir 4096 / 64 bit data per HCsr04, som är 128 avståndet data totala skickas för 2 HCSR04
- De 128 data som har överförts kommer att behandlas och en SONAR karta över hindren inom 200 cm kommer att skapas och det kommer att uppdateras efter varje rotation.
- Genom att bearbeta karta DC MOTOR kommer att reagera på hinder
Var problemet ligger:-
1. ljudet är själva problemet, det blir absorberas, återspeglas och behöver en hel del av området för att faktiskt upptäcka hinder
2. om du kopplar bort hela roboten medan det roterar blir Stepper Motor felplacerad från utgångsläget igen medan starta roboten tycker felplacerade position för att vara sitt ursprungliga läge.
Lösning:-
1. detta steg kan inte ändras för nu, men jag kommer säkert göra någon gång längre fram, i en annan Instructable
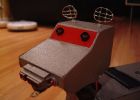
2. kolla in sista bilden för att se sin lösning. Idén är ganska enkel, en människa behöver för att justera den.
Se hur intressant det har blivit nu, vi har kommit en lång väg från debouncing en switch. Men se dess bara ett annat hinder undvika robot, kommer bara med ett annat begrepp.
Vid eventuella frågor eller förslag är du välkommen att kommentera

Nybörjare autonom robot (delvis)

Bita hinder autonom Robot «Sanglier» (vildsvin)

MICBot autonom Robot hinder Deviance

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!

Ollie-en DIY autonom robot luftskepp

DIY RC Android Sumobot (Sumo Robot)

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Raspberry Pi Web kontrollerad / autonom Robot

Första någonsin riktiga pepparkakor autonom Robot (overifierad påstående)

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Hemgjord Modern DIY betong Bar
Autonom Robot med LinkitONE

Billig autonom Robot
K-9 The autonom Robot Pet

MJRoBot jag - enkla steg för att bygga en autonom robot.

Bygga en autonom Robot Wall-E

DIY Mod en Omnibot 80 Robot med röst, kamera, servon, Bluetooth