DIY Johansson - bara en autonom Robot (9 / 14 steg)
Steg 9: Ledningar upp Johansson - genomföra din överenskommelser












Nu är det dags att göra något intressant; innehåller allt lärt du just dig i detta instructable. Jag hoppas det inte var roligt till ännu, men håll bara din tanke just där, roligt är på väg att börja.
Varning:- De flesta av målen i och efter detta steg måste göras enbart köpa görare.. mycket lite hjälp från min sida
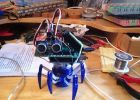
Mål 1:- att bygga chassit.
Saker som behövs:-
- Bara du fantasi, jag skulle inte rekommendera någon form av kit eller särskilda delar, gör vad du vill... lånar, handel, leta efter bra klipp... jag lämnar chassit bygga helt upp till du.
Vad jag gjorde:-
Min bror hade en Zephyr Mechanix hade några slumpmässiga metall bitar, remsor och flygplan med skruvar och muttrar, det var till någon nytta för honom, så jag lånade den och gjorde chassit så subtila som möjligt.
Mål 2:- Att fixa 2 X DC-Motor och hjul
Saker som behövs:-
- 2 X BO - Offset likströmsmotor med hjul [någon motor mindre än 200 RPM bör fungera alldeles utmärkt]
- 1 X L293D Motor Driver modul [om du inte har en modul försök att göra en att se mitt schema]
- 2 X U - Motor klämmor
- 2 x bröd styrelse (om möjligt ta ut två Vcc och gnd linjer från dem.)
- Några bultar och muttrar om det behövs
- 1 X Castor hjulet
- 1 X dubbla dubbelhäftande skumtejp
- Och naturligtvis ditt intellekt
Förfarande:-
- Fixa motorn till önskad position.
- Fixa U-klämman för att placera motorn.
- Ansluta motorn till L293d motor föraren.
- Sticka två brödunderläggen som snyggt och jämnt möjligt att chassit med bandet
- Bifoga eller hålla sig Castor hjulet till din önskat position.
Obs:- Kom bara ihåg att ha en stabil tyngdpunkt.
Mål 3:- Wiring allt upp
Saker som behövs:-
- 2 x 5v spänningsregulator (L7805)
- 3 X Atmega 328 [eller vad någonsin 28 pin AVR du har till hands]
- 2 x 16 MHz kristall Oscillator
- 4 x 22pf keramiska kondensatorer
- 2 x 10 uF elektrolytkondensatorer
- 2 x 1 uF elektrolytkondensatorer
- 1 X ULN 2003 Transistor Array
- 1 x 220 ohm motstånd
- 1 X röd LED
- 2 x 1 k ohm motstånd [något mer än 1 k bör göra fint]
- 1 X RF - RX och TX-modulen
- 1 x Stepper Motor med en plattform på det.
- 1 X dubbla dubbelhäftande skumtejp
- 2 X tryckknapp brytare
- Många små sladdar
- Vissa hoppare ledningar
Förfarande:-
1. minns allt du lärt dig i alla tidigare steg.
2. kolla in första bilden noga för att förstå Johanssons koncept sedan alla ledningarna kommer att bitar av en tårta. (coz det är inte bara ett enda stycke).
3. återgå till de steg som du har glömt eller behöver komma ihåg, det finns inget okänt i detta kretsar om du verkligen har följt varje steg av detta instructable.
3, det finns mane bilder laddas upp med taggar som tydligt beskriva varje anslutningar kolla dem för all hjälp.
4. Cross - check varje ledningar minst 10 gånger, coz en enda felaktig tråd kan äventyra din Atmega (pratar form erfarenhet). Detta steg är det viktigaste av allt
Slutsats:- Gissa vad, detta instructable har nästan kommit till dess mållinjen, allt är klart.. .och bra att gå gå vidare till nästa steg för vissa allvarliga kodning.

Nybörjare autonom robot (delvis)

Bita hinder autonom Robot «Sanglier» (vildsvin)

MICBot autonom Robot hinder Deviance

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!

Ollie-en DIY autonom robot luftskepp

DIY RC Android Sumobot (Sumo Robot)

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Raspberry Pi Web kontrollerad / autonom Robot

Första någonsin riktiga pepparkakor autonom Robot (overifierad påstående)

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Hemgjord Modern DIY betong Bar
Autonom Robot med LinkitONE

Billig autonom Robot
K-9 The autonom Robot Pet

MJRoBot jag - enkla steg för att bygga en autonom robot.

Bygga en autonom Robot Wall-E

DIY Mod en Omnibot 80 Robot med röst, kamera, servon, Bluetooth