DIY Johansson - bara en autonom Robot (3 / 14 steg)
Steg 3: RF - RX och TX moduler {biblioteket används - VirtualWire}






Nu kommer att bli lite komplicerat.. .den Huvudsyftet är att skicka trådlösa data från två HC-SR04 i en annan Arduino som i sin tur visar avstånden i följetong monitorn via USB... RF_TX_test.txt kan verka lite förvirrande men mycket grundligt gå igenom kommentarerna... Den nya metoden och förvirrande linjer förklaras i en sätt så enkelt som möjligt... plzz hålla tron gå vidare till nästa steg du inte skulle tro vad som kommer.
Ladda ner VirtualWire zip -filen och lägga till den i biblioteket
Vänligen läs filen VirtualWire.pdf först och sedan gå vidare.
Kolla in den här instructable för bättre uppfattning om de billiga RF - RX och TX-moduler
Mål 1 : - för att koppla upp modulen TX och HC-SR04 till Arduino och programmera den att skicka trådlösa data
Saker krävs :-
- 2 x HC-SR04
- 1 X Arduino [om 2 Arduino styrelser inte finns, då skulle jag först föreslår dem för att kontrollera det fristående Atmega steget först]. Du definitivt bör ha en annan Atmega sedan.
- 1 X röd LED
- 1 X bakbord [människor med 1 bröd styrelse vänligen justera på något sätt du kommer att behöva två]
- 1 X RF - RX och TX modul [jag använde den röda en, det finns många modeller, Känn dig fri att välja]
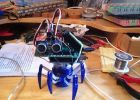
- 1 x 30cm tråd [Helix effekten i bilden är inte nödvändigt, bara gjorde det kort i längd tråd]
- 9V batteri och Snap med DC-Jack och en Slide Switch [att driva TX Arduino]
- Hoppare ledningar [så många krävs]
Förfarande :-
- Kolla den första bilden, och tråd upp modulen TX till Arduino
- Kolla in den andra bilden, och bifoga den 2 HC-SR04 som visas
- Gå igenom RF_TX_test , och förstå först läsa kommentarer och instruktionerna noggrant
- Ladda upp RF_TX_test filen bifogas. Efter uppladdning kan du se lampan blinkar snabbt
- Koppla loss den från datorn. Driva upp med batteriet
- Gå till mål 2.
Mål 2 : - att tråd upp modulen RX till Arduino och Visa mottagna distanserar till seriell bildskärmen
Saker krävs :-
- 1 X Arduino [om 2 Arduino styrelser inte finns, då skulle jag först föreslår dem för att kontrollera det fristående Atmega steget först]. Du definitivt bör ha en annan Atmega sedan.
- 1 x röd LED
- 1 X skärbräda
- 1 x 30cm tråd [Helix effekten i bilden är inte nödvändigt, bara gjorde det kort i längd tråd]
- Hoppare ledningar [så många krävs]
- Några små kablar (tillval) [Just att göra ledningarna snyggt]
Förfarande:-
- Kolla den första bilden, och tråd upp modulen RX till Arduino.
- Ditt ledningar bör något ser ut som den sista bilden.
- Gå igenom RF_RX_test , och förstå först läsa kommentarer och instruktionerna noggrant.
- Ladda upp RF_RX_test filen bifogas. Efter uppladdning kan du inte se lysdioden blinkar coz förmodligen TX Arduino är avstängd.
- Slå på TX Arduino och efter LED börjar blinka.
- Återställa RX Arduino en gång. Då börjar RX LED blinka efter en andra
- CTRL + SKIFT + M för att öppna den Serial monitorn
- Kolla in avläsningarna. Spela med händerna lite och kolla förändringen i data.
Slutledning :-alltså du fick både trådlösa och seriell datakommunikation. Verkar som vi kommer någonstans intressanta nu tror jag. Bara vänta och se.
Förslag : - inte jäkta och ha tålamod och nyfiken båda, bara ta dig tid. Detta är inte en enda dag projekt.

Nybörjare autonom robot (delvis)

Bita hinder autonom Robot «Sanglier» (vildsvin)

MICBot autonom Robot hinder Deviance

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!

Ollie-en DIY autonom robot luftskepp

DIY RC Android Sumobot (Sumo Robot)

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Raspberry Pi Web kontrollerad / autonom Robot

Första någonsin riktiga pepparkakor autonom Robot (overifierad påstående)

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Hemgjord Modern DIY betong Bar
Autonom Robot med LinkitONE

Billig autonom Robot
K-9 The autonom Robot Pet

MJRoBot jag - enkla steg för att bygga en autonom robot.

Bygga en autonom Robot Wall-E

DIY Mod en Omnibot 80 Robot med röst, kamera, servon, Bluetooth