DIY Johansson - bara en autonom Robot (13 / 14 steg)
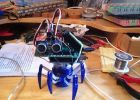
Steg 13: Problemet med HC-SR04

Till dem som har gjort det eller läsa allt jag skrev, dess uppenbart att rover kommer att vara ett fel många gånger, och det mesta är på grund av avstånd för ultraljudssensorer används.
Problem med ultraljud avstånd sensorer:-
1. ljudet ändras hastighet i förhållande till temperatur, luftfuktighet och densitet (låter resor 4,3 gånger snabbare i vatten) men vi kan inte utföra experiment under vatten, du vet vad som kommer hända.
2. dessa sensorer kräver en hel del område att faktiskt upptäcka ett hinder, sin grund till absorberande och reflekterande egendom av ljud medan kollision.
3, längre objektet från sensorn, mer tid det tar att beräkna avstånd (det är en lång process, ljudet blir utsända ut då reflekteras av målobjektet dem vinka kommer och träffar mottagaren), så det tar tid för långa avstånd.
4. och jag tror det finns många fler nackdelar att använda ljud för att upptäcka hinder, vilket inte jag är medvetna om just nu. Kommentera gärna och nämna någon som ni känner till.
Således använder ultraljud avstånd sensorn var en blunder, men vi måste också förbättra just... Så om någon har någon aning om om felsökning av detta enorma problem, gärna efter det här. Jag älskar se och dela nya idéer...
Vad det är.. .jag tror att ni alla hade kul, coz start från debouncing en switch som du kom med ett hinder att undvika Rover, som är ett enormt framsteg inom bara 1 instructable.
Kom alltid ihåg grunderna bör vara första prioritet, och det var mitt primära mål från början
Min Moto:-vet vad du inte vet

Nybörjare autonom robot (delvis)

Bita hinder autonom Robot «Sanglier» (vildsvin)

MICBot autonom Robot hinder Deviance

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!

Ollie-en DIY autonom robot luftskepp

DIY RC Android Sumobot (Sumo Robot)

(Ännu en) DIY Arduino Robotics Platform-A Robot chassi från reservdelar

Arduino autonom Robot (Land Rover / bil) Stage1Model2

Raspberry Pi Web kontrollerad / autonom Robot

Första någonsin riktiga pepparkakor autonom Robot (overifierad påstående)

K-9 2.0. WiFi kontrollerade och autonom Robot hund.

Hemgjord Modern DIY betong Bar
Autonom Robot med LinkitONE

Billig autonom Robot
K-9 The autonom Robot Pet

MJRoBot jag - enkla steg för att bygga en autonom robot.

Bygga en autonom Robot Wall-E

DIY Mod en Omnibot 80 Robot med röst, kamera, servon, Bluetooth