Self Balancing PT (hemlagad Segway) (2 / 6 steg)
Steg 2: Systemdesign

Schematiskt ovan visar ledningarna av de viktigaste komponenterna som väl Avmaska utrustar motorn. Den Arduino kan vara Uno, Nano eller ATmega328 som enda IC. Batterierna är anslutna seriella att få 24V som levererar dual H bron för motorer. Här drivs endast så länge ryttaren håller knappen färdig. I akuta fall, ryttaren bara släpp upp knappen att få unpowered motorerna. Arduino kontrollern använder den seriella kommunikationen i "Packetized"-läge på 38400 baud med H-bron och den trådlösa modulen XBee. Tilt och styra mäts av en acceleration/gyroskop InvenSense MPU-6050 sensorn i en "GY-521" 2 avskilda breakout ombord och kommunicera med Arduino av I2C. Lutningssensorn (adress 0x68) som är den viktigaste är programmerad att sense på varje 20 ms och ger ett avbrott till Arduino. Andra sensorn (adress 0x69) dras av Arduino. Slutligen, rider laddade gränslägesbrytaren syftar till att upptäcka när ryttaren står på SBPT för att aktivera den balanserande algoritmen.
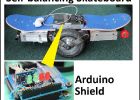
Self balancing skateboard/segw * y projektet Arduino Shield

2-wheel Self Balancing Robot med hjälp av Arduino och MPU6050

Self balancing one wheeled electric skateboard

Self Balancing segway style skoter för under 300,00
Self balancing Raleigh Chopper inspirerade elektrisk skoter

Self Balancing gyroskop på två Inline hjul

Self Balancing Scooter Ver 1.0

Self Balancing gyroskop V3 med hjälp av Arduino och potten för Tilt Sensor
Self Balancing gyroskop på två ätpinnar

Baransu Self balancing skoter

Bygga en segway med Raspberry Pi

Självbalanserande Segway Instructabot

Nils-Johan-själv Balancing robot

Seg... pinne.

PCB Quadrotor (borstlösa)

Lätt bygga själv balansera elektriska skateboard

Självbalanserande Scooter Ver 2.0

Arduino modulär Robot
