Baserade Arduino skrivbordet linje efterföljare - jolliBot (1 / 5 steg)
Steg 1: Byggnaden jolliBot



Det är ganska enkelt att bygga en grundlinje anhängare som bara några komponenter krävs:
- en robot chassi
- vissa sensorer för raden som spårar (svarta eller vita linjer)
- två motorer (servon eller redskap motorer)
- en mikro-controller / elektronisk krets de drivmotorer och genomföra styrlogik
- Batterier, hoppare, skruvar och annan maskinvara
För en mycket grundläggande linje anhängare behövas 1 sensor endast att uppnå raden efter funktion vid låg hastighet och på enkel kontinuerlig spår. Vissa avancerade linje anhängare anställa många fler sensorer som är speciellt avsedda att följa komplexa låtar i hög hastighet.
För jolliBot, kommer vi att använda 5 TCRT5000 IR reflekterande sensorer. Det är vanligt att använda 18mm bred svart eller vit Elektriskt isolerande tejp för att bygga rad efterföljare spår. För vår linje efterföljare, rad 5 sensorer är ordna i en typisk rak linje formation på framsidan och är jämnt fördelade 10,16 mm från varandra. Detta gör max 2 sensorer för att upptäcka den 18mm bred linjen om den rad efterföljare rör sig rakt längs linjen. 5 sensorer bör vara tillräckligt för oss att experimentera med en rad strategier för linje efter.
För mikro-controller, kommer vi att använda för närvarande en av de mer populära bland hobby som är Arduino Nano som är relativt liten och lätt att programmera via USB.
För motorer, kommer vi att använda två micro planetariska inriktad elmotorer på 5V DC som är tillgängliga från Tindie försedda med 32 mm diameter hjul.
Styrmekanismen för jolliBot realiseras i en differentierad enhet som styr roboten av skillnad i rotationshastighet vänstra hjulet och högra hjulet.
För att driva motorerna, kommer vi att använda den L293D H-bridge motorn föraren IC eftersom Arduino inte kan foder motorerna direkt med den hög ström som krävs.
Vi kan koppla upp elektronik krets för våra jolliBot rad efterföljare perf-styrelsen inte är större än 6 x 6 cm. Vi kommer inte att använda ett separat robot chassi och istället kommer att använda perf-styrelsen själv som robot chassi. Eftersom det kan vara ganska jobbigt att bygga den elektroniska kretsen perf-styrelsen, har vi utformat en PCB för dem som inte vill röra runt med för mycket ledningar.
För strömförsörjning, Använd inte den vanliga 3 x AAA batteri som är lätt tillgänglig som kan mata endast omkring 4.5V. Utspänningen är otillräcklig för att på ett tillförlitligt sätt driva Arduino Nano. Här, kommer vi att använda en 3 x AAA batteri power pack med inbyggd DC till DC-Booster för att leverera 5V direkt till Arduino Nano samt att driva motorerna. Detta upprätthåller en mer konstant ingångsspänningen att den elektroniska kretsen såväl som för de micro inriktad elmotorer. 5V DC power pack finns på Tindie. Du kan också källa för alla andra lämpliga 5V power pack för projektet.
För ljudet, kommer vi att använda en 5V Summer. I vårt Arduino program, har vi kodat så att jolliBot skall avge några ljud varning att uppmärksamma att det kommer att utföra sensor normalisering. Användaren bör sedan snabbt placera den runt mitten av raden och se till att ingenting försvårar dess sökväg för processen för att köras korrekt.
Det skall ha 2 lysdioder som fungerar som vänster och höger främre strålkastarna. I vårt Arduino program, har vi kodat för att bara aktivera dem när du följer linjen. Du kan programmera dem att aktivera eller inaktivera baserat på vissa definierade åtgärder.
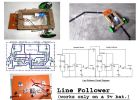
Layout placeringen av sensorer och motorerna monterade på perf-styrelsen eller på våra anpassade PCB finns i de bifogade bilderna.
Vi kommer inte att visa dig i detalj på hur tråd upp kretsen i perf-styrelsen. Du kommer att behöva räkna ut hur bäst för att bygga banan i perf-styrelsen själv baserat på Principskiss för jolliBot.
I nästa avsnitt, vi skall visa hur jolliBot är monteras med våra tillverkade PCB. Detta bör förhoppningsvis vara till hjälp om du följer detta projekt binda den upp med perf-board.
Som vi nämnde tidigare, måste du ha grundläggande elektronik kunskap för att bygga banan på perf-styrelsen utifrån det Schematiskt diagram här.

Uppgradera Analog linje efterföljare till Arduino med Attiny85

SVART linje efterföljare ROBOT

Linje efterföljare Robot utan Arduino eller Microcontroller

ENKLASTE linje efterföljare

Bygg en SpurtBot linje efterföljare
Enklaste linje efterföljare Robot

Rad efterföljare med msp430g2 launchpad

Högpresterande rad efterföljare Robot

GEST kontrollerade Arduino baserade Rover (Wireless + linje följande)

Rad efterföljare Robot använder kameran Shield i 1Sheeld & Arduino

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

ATtiny13A rad efterföljare

Autonoma rad efterföljare robot

Rad efterföljare Robot - PID Control - Android Setup

DIY rad efterföljare Sensor Array

Rad efterföljare Robot

LINUSBot - rad efterföljare Robot - med PID control

PID rad efterföljare Atmega328P
