Baserade Arduino skrivbordet linje efterföljare - jolliBot (3 / 5 steg)
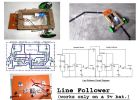
Steg 3: Montering av jolliBot







Du kan visa följande YouTube-video för att se montering av jolliBot DIY kit att bättre förstå hur jolliBot är bygga.
Följande är de steg som skall tas för montering av jolliBot:
Varning: Identifiera toppen och botten av PCB från etiketterna "TOP" och "Botten" silke-screening på PCB. Se till att du är på rätt sida av PCB innan du fortsätter att löda komponenterna.
Steg 1: Böja fem 330 ohm motstånd och löda upprätt till R1, R2, R3, R4 och R5 på botten av PCB.
Steg 2: Böja de två 3.3K ohm motstånd och löda upprätt R11 och R12 längst ner av PCB.
Steg 3: Böj de fem 12K ohm motstånd och löda upprätt till R6, R7, R8, R9 och R10 på botten av PCB.
Steg 4: Böj 100 ohm motstånd och löd den upprätt till R13 på botten av PCB.
Steg 5: Löda 0.1uF kondensator till C3 på botten av PCB.
Steg 6: Löda 16 stift IC uttaget till IC1 längst ner av PCB. Se till rätt orientering.
Steg 7: Sätt L293D IC i IC1 uttaget. Se till rätt orientering.
Steg 8: Löda två 5mm lysdioder att LED1 och LED2 med benen sträcker sig cirka 8mm över toppen av PCB. Säkerställa korrekt polaritet med längre försprång på LED lödas till '+'. Lampor behöver inte böjas framåt i detta skede.
Steg 9: Löda batteri uttaget till J4 på toppen av PCB. Se till rätt orientering.
Steg 10: Löda två 100uF kondensatorerna C1 och C2 på botten av PCB. Säkerställa korrekt polaritet.
Steg 11: Ta bort 8 stift från 18 pins kvinnliga huvud som visas i figuren nedan och sedan löd den över sensorer S1 till S5 på botten av PCB.
Steg 12: Trimma bort båda benen av IR-LED (blå lins) på fem TCRT5000 optiska sensorer till en längd på ca 6mm från botten av svart plast-inhysa. Infoga trimmade benen för varje av de fem TCRT5000 sensorerna i 18 pin kvinnliga huvudet och löda andra 2 otrimmade benen till S1, S2, S3, S4 och S5 respektive på PCB.
Steg 13: Infoga summern från toppen av PCB och löda summern terminalerna underifrån. Se till att rätt polaritet ("+" märket på toppen av summern ska vara kvar). Observera att detta är den mest utmanande uppgiften på grund av utrymme tvang att löda summern terminalerna.
Steg 14: Löda två 15 stift kvinnliga headers till J1 och J2 på botten av PCB. Du kan infoga i Arduino Nano i de kvinnliga headers innan lödning att hålla huvudena på plats under lödning.
Steg 15: Dirigera trådarna på två hjul motorerna genom 2 hål nära varje ände av IC1 och löda motoriska trådarna på M1 och M2 på toppen av PCB. Se till den svarta och röda tråden är lödda till rätt stift på M1 och M2 som visas i figuren.
Steg 16: Använda metall bindemedlet klippet för att klämma den två hjul motorer. Justera motorerna så att de spänns fast så mycket som möjligt men det måste finnas bra avslut mellan hjulen och PCB. Ta bort båda klipp handtagen.
Steg 17: Klistra självhäftande klart cirkulär stötfångaren på metall Binder-dokumentet som visas i figuren nedan.
Steg 18: Sätt tråd-bildade dödläge i 18 pin kvinnliga rubriken som visas i figuren nedan.
Steg 19: Sätt in den Arduino Nano i huvudena på J1 och J2 på PCB. Se till rätt orientering.
Steg 20: Loop buntband genom skårorna på metall bindemedel klipp som visas i figuren och gör en loop så att kabel slips loop storlek räcker bara infoga ditt Power Pack genom.
Steg 21: Skjut 5V batteri Power Pack genom kabel slips öglan och trimma bort överflödig kabel slips slutet. Anslut nätdelen kontakten till uttaget J4.
Steg 22: Böj 2 LEDs framåt för att slutföra den rad efterföljare.

Uppgradera Analog linje efterföljare till Arduino med Attiny85

SVART linje efterföljare ROBOT

Linje efterföljare Robot utan Arduino eller Microcontroller

ENKLASTE linje efterföljare

Bygg en SpurtBot linje efterföljare
Enklaste linje efterföljare Robot

Rad efterföljare med msp430g2 launchpad

Högpresterande rad efterföljare Robot

GEST kontrollerade Arduino baserade Rover (Wireless + linje följande)

Rad efterföljare Robot använder kameran Shield i 1Sheeld & Arduino

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

ATtiny13A rad efterföljare

Autonoma rad efterföljare robot

Rad efterföljare Robot - PID Control - Android Setup

DIY rad efterföljare Sensor Array

Rad efterföljare Robot

LINUSBot - rad efterföljare Robot - med PID control

PID rad efterföljare Atmega328P
