Baserade Arduino skrivbordet linje efterföljare - jolliBot (4 / 5 steg)
Steg 4: Programmera Arduino

I jolliBot Avancerat In-Action YouTube video, vi har testat den rad efterföljaren med grundläggande kontroll samt en mer PID control programmet koder. Med den grundläggande kontrollen, du kan märka skakis och vinglig förflyttning av den rad efterföljare men med mer avancerade PID control, det finns en märkbar förbättring i hastighet och förflyttning av vår linje efterföljare.
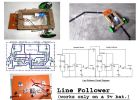
För vår grundläggande kontroll använde vi bara 3 i rad sensorer för line detection, vänster (S2), Center (S3) och höger (S4). När Center sensorn upptäcker linjen, är roboten programmerad att gå rakt. När Center sensorn känner inte längre linjen, men vänstra sensorn känner linjen programmeras roboten till höger. När Center sensorn känner inte längre linjen och rätt sensorn känner linjen, är roboten programmerad att svänga vänster. Detta medför normalt roboten att vingla fram och tillbaka över linjen och om det går för fort, kan förlora kontrollen och stoppa längs med den.
Du kan hämta vår grundläggande linje efter konceptet Arduino skiss nedan:
jolliBot_3Sensors_BasicControl.ino
Vi vet att det är möjligt att förbättra på rörelse och hastighet av jolliBot med mer avancerade kontroll algoritmen som bevittnat i videon. Men kommer vi inte att ge mer avancerade Arduino kod här. Vi hoppas du kan forskning och komma med koder för jolliBot att förbättra dess prestanda.

Uppgradera Analog linje efterföljare till Arduino med Attiny85

SVART linje efterföljare ROBOT

Linje efterföljare Robot utan Arduino eller Microcontroller

ENKLASTE linje efterföljare

Bygg en SpurtBot linje efterföljare
Enklaste linje efterföljare Robot

Rad efterföljare med msp430g2 launchpad

Högpresterande rad efterföljare Robot

GEST kontrollerade Arduino baserade Rover (Wireless + linje följande)

Rad efterföljare Robot använder kameran Shield i 1Sheeld & Arduino

Enkel rad efterföljare robot med hjälp av en Actobotics Runt Rover spira

ATtiny13A rad efterföljare

Autonoma rad efterföljare robot

Rad efterföljare Robot - PID Control - Android Setup

DIY rad efterföljare Sensor Array

Rad efterföljare Robot

LINUSBot - rad efterföljare Robot - med PID control

PID rad efterföljare Atmega328P
