CNC Robot Plotter (1 / 11 steg)
Steg 1: Väggmonteringssats


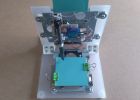
Monteringsfästet gjordes från en 60mm remsa av 18 gauge aluminiumplåt. Aluminium valdes för fästet som är lätta och lätt att arbeta. En 3 mm borr användes för de små hålen. Var och en av de större hålen började livet som en 9 mm hål som utvidgades med hjälp av en "rat-tail" fil.
Ändplattor för motorerna i ovanstående bilder är 56 mm x 60 mm fördelade 110 mm isär hopvikt. Detta gav en Centre-till-centrum hjul avstånd 141 mm. Den Whäl-diameter för denna robot är 65 mm. posten dessa mått eftersom deras Ratio (CWR) avgör hur många steg behövs för att rotera roboten genom 360 grader.
Om du tittar noga på bilderna visas ett hack-såg snitt på varje hjul "kjolar". "Sliver" av metall under var och en av dessa såg-nedskärningar har varit böjde sig ner så något sådan att:
- plattform (fästet överst) är nivån,
- och roboten klipporna knappt.
Det är viktigt att pen-lift mekanismen är mitt emellan, och i linje med hjulen. Än den robot måtten är inte kritisk.
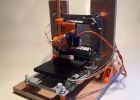
Penna-liften består av en plast medicin flaska som monteras genom aluminium fästet som visas. Hål borras genom locket och botten för pennan. Penna-lift skivan består av i slutet av en tom plast krok-up-wire spool limmade till en radio knopp som har drillats för att passa penna mässing centrum. En liten bly fiske lodet, passande borras, har placerats över pennan att säkerställa kontakt med papper hela tiden.
Roboten drivs från sex AA-batterier monterade nära hjulen att minimera belastningen på tredje stöd.
[Tips: blad aluminium kan skäras utan behov av en giljotin eller tin-snips (som har en vana att deformeras metall). Tungt "poäng" båda sidor av arket längs cut-linjen med hjälp av en stål linjal och en tunga break-off-blade kniv. Nu placera poäng-raden över kanten på ett bord och böja bladet ned något. Vänds i bladet och upprepa. Efter några böjar kommer bladet fraktur längs hela längden av poäng-line lämnar en rak kant.]

Hemgjord professionell Video DSLR kamera reglagen DIY Dolly stabilisator motoriserade linjär CNC

Borstlösa Gimbal balansera Robot

Cómo hacer un robot que dibuje con Makeblock

(Inofficiell) API Guide för mDrawBot mScara

ECLIPSE, en kommande Knex Ball maskin.

Bygga en "Interocitor"-en främmande kommunikation enheten Steampunk Bonsai den sista delen
Hemgjord Lizylotte Robot Arm Plotter Robotic Draw DIY ram CNC aluminiumlegering
Hemgjord gravyr Plotter Laser ram DIY X CNC axel bild linjära
Hemgjord gravyr Plotter Laser Frame DIYX axel bild linjär CNC material
Hemgjord Laser 3D-skrivare gravyr Plotter ram DIY X Axis Skjut linjär CNC

Mini CNC Plotter
Mini Traceur Arduino - Mini CNC Plotter

Intellekten Galileo kontrollerade cnc plotter
Hemgjord X Y Z bild CNC för Laser gravyr Plotter 3D-skrivare maskin ram av aluminiumlegering

ARDUINO själv Mini-CNC (Plotter)
Hemgjord skrivare gravyr Plotter Laser 3D ram DIY X Axis Skjut linjär CNC
DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
Hemgjord Lizylotte Robot Arm Plotter Robotic Draw DIY ram Aluminium 2 Stepper Motor