CNC Robot Plotter (2 / 11 steg)
Steg 2: Pen-lift och sköld

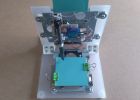
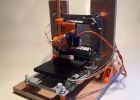
Jag experimenterade med den ursprungliga buntband och valt att istället för en plast skivor limmade till en "radio-knopp" mässing centrum. Mässing centrum borrades för att passa pennan. Grub-skruven kan exakt positionering av pennan. Den plast skivan sänktes från slutet av en spole av krok-up tråd.
Penna-lift mekanismen består av en liten servo som följde med min ursprungliga Arduino kit men någon liten servo som svarar på 1mS och 2mS pulser fördelade 20mS isär bör fungera. Roboten använder 1mS pulser för pen-upp och 2mS pulser för pennan ner.
Servo är kopplad till medicin flaskan med små buntband. Servo horn lyfter plastskivan, och därmed pennan, när en penna upp kommando tas emot. När en penna-down-kommando tas emot är servo horn väl klart av skivan. Vikten av skivan och mässing montering säkerställer att pennan förblir i kontakt med papperet. En lead vikt kan gled över pennan om du vill "tunga" linjer.
Min hela kretsen byggdes på en Arduino prototyp sköld. Koppla bort skölden när du vill ladda upp en skiss till din Arduino. När skissen har laddats bort USB programmera kabel sedan ersätta sköld.
Batteridrift matas till Arduino via "Vin" PIN-koden när skölden är fäst. Detta gör snabba förändringar att göras för att din programvara utan att köra in batteri och bluetooth konflikter.

Hemgjord professionell Video DSLR kamera reglagen DIY Dolly stabilisator motoriserade linjär CNC

Borstlösa Gimbal balansera Robot

Cómo hacer un robot que dibuje con Makeblock

(Inofficiell) API Guide för mDrawBot mScara

ECLIPSE, en kommande Knex Ball maskin.

Bygga en "Interocitor"-en främmande kommunikation enheten Steampunk Bonsai den sista delen
Hemgjord Lizylotte Robot Arm Plotter Robotic Draw DIY ram CNC aluminiumlegering
Hemgjord gravyr Plotter Laser ram DIY X CNC axel bild linjära
Hemgjord gravyr Plotter Laser Frame DIYX axel bild linjär CNC material
Hemgjord Laser 3D-skrivare gravyr Plotter ram DIY X Axis Skjut linjär CNC

Mini CNC Plotter
Mini Traceur Arduino - Mini CNC Plotter

Intellekten Galileo kontrollerade cnc plotter
Hemgjord X Y Z bild CNC för Laser gravyr Plotter 3D-skrivare maskin ram av aluminiumlegering

ARDUINO själv Mini-CNC (Plotter)
Hemgjord skrivare gravyr Plotter Laser 3D ram DIY X Axis Skjut linjär CNC
DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
Hemgjord Lizylotte Robot Arm Plotter Robotic Draw DIY ram Aluminium 2 Stepper Motor