Enkla Robotics skärbräda (4 / 9 steg)
Steg 4: H-brygga för motorstyrning

Mikrokontroller levererar styrsignaler SwitchA (som kan vara HI eller LO), SwitchB (HI eller LO) och aktivera (HI eller LO). SwitchA kontroller A1 och A2 i diagrammet. När SwitchA är HI, stängs A1 och A2 är öppen. När SwitchA är LO, A1 är öppen och A2 är stängd. SwitchB kontroller B1 och B2 på samma sätt. Aktivera fungerar annorlunda. När Aktivera är HI, nära både växlar ansluten till det; de öppna när det är LO, således stänga motorn. Låt oss betrakta vad som händer när vi gör SwitchA HI, SwitchB LO och aktiverar HI. Två växlar kontrolleras av aktivera Stäng och A1 och B2 också nära. A2 och B1 förbli öppen. Så finns det en komplett krets från Vmot (spänning på motorerna) till marken genom motorn. Strömmen flödar som framgår av den röda pilen. Om vi nu stänga av SwitchA och slå på SwitchB, öppna A1 och B2 medan A2 och B2 nära. Återigen har vi en komplett krets från Vmot till marken, men denna gång riktningen av strömflödet reverseras genom motorn (som visas av den gröna pilen), så det vänder dess riktning av rotation.
Om vi aktivera eller inaktivera både SwitchA och SwitchB på samma gång medan aktivera är HI, då ser motorn samma spänning på båda sidor. Ingen ström flyter, men dynamisk bromsning av motorn sker och det kommer till stopp snabbare än om bara aktivera slås LO (av). Ibland är det viktigt om du vill stoppa din robot snabbt.
Stor! Vi kan styra riktning, men vad om hastighet? Det är där aktivera signalen kommer in. Självklart, om vi stänger av aktivera är vår nuvarande väg avbryts och motorn skulle sluta. Men vad händer om vi aktivera aktivera och inaktivera mycket snabbt? Som det visar sig, om vi gör detta snabbt nog, motorn kommer aldrig till en helt stilla men saktar bara ner. Till exempel, om växeln är avstängd halva tiden ser då motorn halva makten. Denna teknik kallas Pulse bredd Modulation (eller PWM för kort). En fullständig diskussion är utanför omfånget för detta Instructable (Google kan hjälpa dem som är intresserade) men microcontrollers använder vi har speciella kretsar bara för detta. Babuino ger tre signaler för att styra varje motor. För Motor A kallas de Motor A vänster, Motor A höger och Motor en PWM. Motor B har liknande styrsignaler. Vänster och höger är de signaler vi kallat SwitchA och SwitchB ovan, och således kontrollera motor riktning. PWM är aktivera signalen.
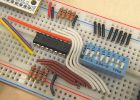
H-bron gör alla växlingen vid hantering av tillräcklig ström för att köra motorerna. Viss H-bron vi använder är L293D. L293D är en dubbel H-Bridge IC som har anti kickback dioder byggdes. Anti kickback dioder skydda H-bron från nuvarande spikar. L293D är allt vi behöver för att framåt/bakåt kontrollera för två små DC motorer. Två av dem kan styra fyra motorer. Diagrammen att följa hur ska koppla den för våra robotics bakbord.

Enkla Robotics för nybörjare!

Billigt, lätt Robotics för icke-programmerare
Greppa gravitationsvågor: Augmented Reality robotar lära fysik grunderna till både barn och vuxna

Enkla Arduino Robotics plattform!
Carduino - A enkla Arduino robotics plattform med ett eget bibliotek

Enkla förbränning Launcher

Robotics på en budget

Enkla ljus efter Robot

Hur till förbättra gamla loggar in trä brännare öka effektiviteten Clean burn förgasning sekundär förbränning

2 x 4 avsluta korn skärbräda / slaktare kvarter
Bygga en skärbräda Prototyping modul

Enkla läder projekt från skrotar

Enkla Sangria recept

Enkla men Fancy Pants Show-off äppelpaj Hand

Intellekten Edison och Ridemakerz RC chassi Robotics plattform

Enkla Arduino PIR rörelse detektor modul Demo
Hur man använder en skärbräda

Enkla desoldering teknik
