PCB Quadrotor (borstlösa) (7 / 20 steg)
Steg 7: landningsställ och Motor chock Proofing


Små quadrotors är trevligt eftersom de kan överleva kraschar ganska bra. Det finns några svaga länkar, dock, och det här steget försöker dessa.
Landningsställ:
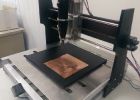
Landningsstället jag valde var 1"-långa aluminium 2-56 standoffs. Jag försökte ursprungligen plast och kära, men de bröt på tuffa landningar. Aluminiumet som är mycket mer tålig, inte så mycket vikt påföljd. De fäster direkt till den yttersta motor fästskruven (Använd threadlocker). För att dämpa landningar, La jag fyra små silikon fötter till landningsställ. Utan dessa överförs chocken från landningar direkt in i motorn, som ibland kan fall dess rotor tryck passar att misslyckas (se nedan).
Chock Proofing-motorerna:
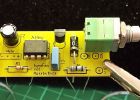
Den mest vanliga felmoder som jag hittade under kraschen landning var motor burkar kommer ifrån varandra. (Se den andra bilden.) Chocken från en krasch skulle störa den smala passar att misslyckas, och ingen mängd av superlim eller Loctite skulle hålla ihop. Problemet med lim som det är att gemensamt är sprött, så chocken sprickor bara limmet bort.
Jag hittade en mycket bättre lösning var att faktiskt värmen krympa hela motorn. Du kan se detta i den första bilden: tre av de fyra motorerna är värme-krympt. Detta minskar förmodligen motor kylning lite, men kompatibel värme förminska gör ett mycket bättre jobb att hålla rotorn tillsammans under chock laddar av en forcerad landning. Bara vara noga med att klippa och den krympslang jämnt, eller kommer det att kasta ur balans av rotoren mycket.

Nya och förbättrade borstlös Electric Scooter Power System Guide

En Wide Body Quadrotor - mönster och idéer för att bygga din egen.

RC Quadrotor helikopter

Ännu ett billigt Quadrotor - inskickad av BayLab för Instructables Sponsring programmet

Quadrotor
PCB isolering spår fräsning med MyDIYCNC Desktop CNC maskin

Avancerad borstlös Power Systems för små elektriska skotrar

Hur man gör en anpassad elektriska Go-Kart och borstlösa DC Motor

Göra en borstlös DC Motor

30seconds Nailpolish PCB

GENERADOR ELECTRICO CON fenor BORSTLÖS

Wearable PCB Guerilla valuta - den "gyllene bocken"
Hur man löda din fumeFan PCB KIT / några PCB KIT

Göra högkvalitativa PCB hemma själv

Arduino Stand - Alone PCB

Borstlösa Gimbal för Aerial Photography drönare

Konvertera en gammal RC bil till borstlös
Drone Gimbal bygga: HobbyKing "chock absorberande 2 Axis borstlös Gimbal Kit'
