Robotic Mekaniska Spider (2 / 8 steg)
Steg 2: ram








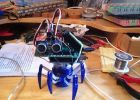
Som sett i de medföljande bilderna, är ramen av en rimlig storlek för att rymma ben paren. Den stora mängden lediga utrymme som fanns kvar inuti var extra område för mig att ha till mitt förfogande om jag behöver det, för komponenter som batteri, kablage, mottagare etc. En stor del av denna yta togs upp av kraftsystemet och dess montering. Anledningen till det har viss taggiga former är för estetik, eftersom dessa fungerar ingen fördel att fungera av mitt projekt. ramen är den viktig komponent som kommer att märkas mest så jag tror det har att se så bra som möjligt.
För att göra det jag tryckt ut en 2D nätet på varje halva och limmade på ett stort ark 3 mm akrylplast. Sedan använda en bläddrar såg jag klippt ut konturen och också några platser som gjort de mellersta delar till slot i (se bilder) innan handen arkivering av eventuella överskott plast hullingar och borra hål att fästa olika komponenter. (Detta steg kommer att vara mycket snabbare om du har någon form av laser eller CNC fräs kan du istället för att manuellt göra det för hand). Efter detta jag värmt upp de områden som behövde böja med en plast bender och böjde akryl till önskad form med vägledande träklossar skära till rätt vinkel. När detta var gjort allt som krävdes var att limma mellersta bitarna på plats och ramen slutfördes.
Robot mekaniska skalbagge. V1

Mekaniska spider

Arbetar med robotar

[DIY] Spider Robot (Quad robot, fyrfotingen)

Förbättrad Spider Robot

3-D tryckt mekaniska Walking Robot leksak!

Hexapod4 Spider Robot bruksanvisning

[DIY] Spider Robot - del II - Remote control

Mainan Anak-Robot Laba Larsson - bygga DIY Spider Robot

[vPython] Spider Robot simulator

Mekaniska ljus Sensing och Flex sensorer kontrollerade blomma Robot
Hex bugg spider med en hjärna (autonom robot)

Arduino Nano baserat Hexbug Scarab Robotic Spider

Spider Pig - autonoma hexapod robot

Robotic Spider V8

Enkel mekanisk (robotic hand) gjord av kedjan
Svanmärkt mekaniska Robot Hand

3D tryckt "Transformers" Robot - Spiderbot
