Robotic Mekaniska Spider (8 / 8 steg)
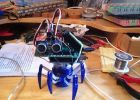
Steg 8: Färdiga projektet








Under loppet av detta projekt finns flera saker jag skulle ha förändrats. Nummer ett skulle vara att göra benen och växellådor först och sedan baserar ramstorleken runt dessa uppmätta sträckor. Om jag hade såg gjort det skulle ha sparat mig en massa tid som jag tillbringade korrigera små fel och enligt min mening skulle ha estetiskt mycket bättre. Även tillgång till en laserskärare eller något liknande skulle ha påskyndas utvecklingen av detta projekt.
Sammantaget är jag mycket nöjd med den färdiga produkten och det är en fan av en massa roligt att använda.
Se Steg
Relaterade Ämnen
Robot mekaniska skalbagge. V1
Detta är en liten robot som jag gjort efter att ha kommit över några mikro mask motorer. Jag har ingen aning vad motorerna faktiskt ska användas för, men de är idealiska för små robotar. Skalbaggen kan röra sig på lite fart och kan också undvika hind...

Mekaniska spider
Det är svårt att konkurrera med deeffektiviteten av ett hjul på släta hårda ytor men som villkor ökar rullande friktionen, denna koppling blir mer lönsamt och hjul av liknande storlek kan inte hantera hinder som denna koppling kan. Leksaker kan utvec...

Arbetar med robotar
framsteg i miniatyrisering teknik och datorer har gjort för att öka rutinmässig användning av obemannade flygplan, en gång gjort av mannen. Högsta repeterbarhet och arbete baserat på regler kanna nu bli automatiserat med hjälp av avancerad robottekni...

[DIY] Spider Robot (Quad robot, fyrfotingen)
2016-04-01 ändra:Korrigera batteri modellnamnet och dimension.2016-01-24 uppdatering:Öppna källfilen PCB som är designat av EaglePCB, https://github.com/regishsu/SpiderRobot2015-10-11 ladda upp bildfilen PCB layout.2015-10-04 uppdatering:Steg 2: Sche...

Förbättrad Spider Robot
Jag letar alltid ett nytt projekt att göra på min robotics workshop för barn. Spindel robotar är spännande, nästan alla av dem är antingen alltför komplex med 10 + servon eller över budget långt för min verkstad. I sökandet efter billigare alternativ...

3-D tryckt mekaniska Walking Robot leksak!
Detta är en helt mekanisk leksak robot som jag designade. Varje del kan skrivas ut, slipas och monterade! Det finns en inre mekaniska chassi och system inom denna robot och kan flytta både ben och armar.Steg 1: Solidworks fil - utskrift Robot Det för...

Hexapod4 Spider Robot bruksanvisning
ICStation Team presentera hur du DIY den Hexapod4 Spider Robot.För att göra denna robot flytta, behöver vi bara styrprogram och följande komponenter:1.6 ben 18 DOF Robot svart spindel Robot 18pcs SG90 servomotor2.32 kanaler Servo Motor Controller Rob...

[DIY] Spider Robot - del II - Remote control
Det är del 2 av min Spider robot project - hur man fjärrkontrollen via bluetooth.Här är del 1 - om du är intresserad av denna robot.Det är ett enkelt sätt att skicka kommandot till denna spindel robot av seriell kommunikation.Steg 1: Se till att blue...

Mainan Anak-Robot Laba Larsson - bygga DIY Spider Robot
Byggnaden DIY Spider Robot...

[vPython] Spider Robot simulator
Jag använder vPython för att simulera åtgärderna för min Spider robot. Som kommer lätt att utveckla ditt eget intresse åtgärder i pc/mac och sedan port till arduino.Det finns verkliga roboten instructable om du är intresserad av det.VPython är Python...

Mekaniska ljus Sensing och Flex sensorer kontrollerade blomma Robot
Syfte:Skapa en robot som följer ljuset och kan flytta med flex sensorer på en handskeDetta instructable var inspirerad av:Detta instructable skapades enlighet projektet kravet på Makecourse vid University of South Florida (www.makecourse.com).Steg 1:...
Hex bugg spider med en hjärna (autonom robot)
i detta instruera kompetent, jag kommer att visa dig hur man förvandlar en vanlig hex bugg spindel, till en intelligent robot med sensorer på den.Steg 1: Delar och materialDelar:(1) en Hex bugg spindel(2) en Ping ultraljud avstånd sensor(3) en protot...

Arduino Nano baserat Hexbug Scarab Robotic Spider
Idén:För att bygga en programmerbar robot spindel baserat på Hexbug Scarab, utrustade med följande sensor suite:[video]Ultrasonic avstånd sensorHinder för IR-sensorer/utrustningGyroskopAccelerometerLaserpekareRoboten ska kunna göra en massa saker. Bl...

Spider Pig - autonoma hexapod robot
Ungkarl examensarbete av en grupp av sju studenter (i teknisk fysik och elektroteknik) vid Linköpings universitet.Viktigaste hårdvara:1 x PhantomX AX metall Hexapod Mark II Kit (inklusive 18 x Dynamixel AX-12 servon, exklusive ArbotiX Robocontroller)...

Robotic Spider V8
jag behövde ett projekt som skulle använda alla mina servon, så jag beslöt att göra dagdrivare, värdelösa spindeln. Om du har fischertechnik och servon till avfall, är projektet för dig! Denna floppa spindel gör verkligen, för ett bra lärande projekt...

Enkel mekanisk (robotic hand) gjord av kedjan
Detta är mycket liknar:Jag hade ursprungligen tänkt att bygga detta som länken rekommenderas - men jag hatar lim, tejp och plast. Jag vill ha det svetsade/lödda/skruvas ihop så jag valde vad du ser i bilden.Tog en hel del tips från den Mythbuster epi...
Svanmärkt mekaniska Robot Hand
om du använder Korrugerad plast istället för papp... har du en bajs-scoop :D...

3D tryckt "Transformers" Robot - Spiderbot
Spiderbot är en imitation av de "Transformers". Det är en RC fyrfotadjur robot och har två driftslägen: spider och fordon, precis som robotarna i "Transformers". Det är Arduino-baserad och kontrollerad av Android-telefon med Bluetooth....

PulleyBot: En remskiva Driven Robot
PulleyBot är en enkel, enhetlig manöverdonet 3D tryckta leksak med en växellåda som helt består av trissa system. Detta instructable är en handledning om hur man monterar PulleyBot, men om du är intresserad av remskiva, kabel och kedjan mekanismer, d...