Robotic Mekaniska Spider (6 / 8 steg)
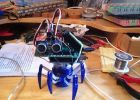
Steg 6: elektronik






Detta kopplingsschema är en mycket förenklad version för överenskommelser skull och inkluderar inte elektroniken inuti var och en av de viktigaste komponenterna.
Vilket batteri som används för detta projekt var ett standard 8,4 volt-modellering batteri. Använda Kirchhoffs lag (spänning delar i serien) kunde jag ha alla 8,4 volt eller dela den och 4.2. Jag valde att använda detta batteri för ett antal skäl, nämligen att det är laddningsbara vilket är mycket bekvämt för en leksak som denna som kommer att använda makt snabbt, det är lätta och därför inte kommer att lägga mycket massa som kräver rörliga, plast adaptern passar med andra radioutrustning som jag har som en varvtalsregulator och mottagare och det faktum att jag aldrig hade att köpa den , som det var ett extra batteri i mitt garage. Medan 8,4 volt riskerade att bränna ut motorerna jag hade inget val men för att sätta dem parallellt som att sätta varje par i serien innebar inte tillräckligt med kraft användes och under påfrestningen av benen motorerna inte skulle rotera. Så därför när du använder mitt projekt jag har att se till att inte använda gasen alltför våldsamt eller riskera att förstöra motorerna.
Servo är för att ge rörlighet för min roterande mekanism och fungerar som någon vanlig servo skulle
Mottagaren tar signalen från sändaren och skickar den till både servo och hastighet controller. Det är denna enhet som synkroniseras till registeransvarige och är vad som tillåter mig att ta emot radiosignaler på grund av den inbyggda antennen.
Varvtalsregulator är den centrala delen av detta projekt och vad styr både servo och elektriska motorer genom att begränsa deras rotation proportionellt mot beloppet påtvingas det sändaren. Den är ansluten till batteriet, alla fyra motorer parallellt, mottagaren och en switch.
Lyckligtvis kunde jag använda mottagare, sändare och hastighet controller från en gammal remote bil samt att hitta ett lämpligt batteri som räddade mig en massa pengar och tillät mig att återvinna gamla komponenter.
Robot mekaniska skalbagge. V1

Mekaniska spider

Arbetar med robotar

[DIY] Spider Robot (Quad robot, fyrfotingen)

Förbättrad Spider Robot

3-D tryckt mekaniska Walking Robot leksak!

Hexapod4 Spider Robot bruksanvisning

[DIY] Spider Robot - del II - Remote control

Mainan Anak-Robot Laba Larsson - bygga DIY Spider Robot

[vPython] Spider Robot simulator

Mekaniska ljus Sensing och Flex sensorer kontrollerade blomma Robot
Hex bugg spider med en hjärna (autonom robot)

Arduino Nano baserat Hexbug Scarab Robotic Spider

Spider Pig - autonoma hexapod robot

Robotic Spider V8

Enkel mekanisk (robotic hand) gjord av kedjan
Svanmärkt mekaniska Robot Hand

3D tryckt "Transformers" Robot - Spiderbot
