3D-tryckt Biologically-Inspired Robotics (10 / 44 steg)
Steg 10: Avsiktliga misstag



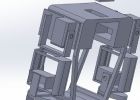
Från början, jag kände igen detta var mekaniskt inte rätt metod. Till att börja med, kan det inte expandera och sträcka som en faktisk tentakel. Det också endast tillåtet för deformation längs två axel, och --endast längs en singular pivot. Detta är mindre än idealisk för att en faktisk tentakel möjliggör deformation i någon riktning i en viss punkt längs dess längd. Det är också stel och inte särskilt lämpad att greppa saker.
Svansen är aktiveras av fyra metall kablar passerade genom fyra på varandra följande rader av hål i var och en av skivorna. Dessa rader är ordnade i kardinal kompass positioner runt centrum. Om du drar på en kabel, svansen kommer att böja i den riktningen, och om du drar på motsatt kabeln, det kommer att dra i den andra. Genom att växelvis dra olika kablar, kan svansen göras att böja i någon riktning.
Dock ville jag har direkt erfarenhet att förstå varför denna särskilda tentakel-liknande konfiguration inte var rätt. Jag behövde fysiskt interagerar med den innan jag kunde faktiskt förstå varför det var ett misstag. Jag ville också se om det fanns något att finna värde i sin design. Efter några inledande experiment slutsatsen jag att trots alla sina brister, det var - trots allt - ganska nära vad jag försökande till gör.
Denna design anser slutligen imitera en tentakel. Men inspirerade denna mekanism senare strategier mot Gångjärnnoder. Jag tycker också det är kanske något värde i denna design för landbaserade tentakel robotar; men mer om det senare.

CupBot - 3D tryckt Robotics plattform

3D tryckt ställningar för cellkultur

Smeka blick: 3D tryckt strukturer med SMA manöverdon

Design för en 3D tryckt kulinariska centrifug

3D tryckt modulära Mars livsmiljö modell

3D tryckt interplanetära raket

Cykel BoosterPack: En 3D tryckt bärbara elektriska Assist

BABY träd: 3D tryckt Quick-Change kamerafäste för en babyvakt

3D tryckta Raspberry Pi Tablet och vagga för VEX praktiken fält

3D tryckt Walking Robot

Aerobox - ett mjukt Robotics System

3D tryckta DIYbio mini centrifug

3D tryckta BATON - 100% 3D tryckt - utskrifter i en PRINT - redan har monterats - enda EXTRUDER - ingen stöder

CupBots - 3D tryckt Robotic plattform för Arduino och Raspberry Pi

Robotar för förändring: en första Robotics Team Fundraiser

3D tryckta visitkort

Liminal massa: 3D tryckt tak

3D tryckt reaktion Diffusion mönster