3D-tryckt Biologically-Inspired Robotics (23 / 44 steg)
Steg 23: Böjbara leder





Det första steget mot att göra en icke-hydraulisk lösning var att komma fram till en tillfredsställande böjbar led som kan dras med en kabel. Steven Vogel påpekar i "Cat's tassar och katapulter", mekaniska fogar tenderar att glida och glida, men ekologiskt leder böja. Jag fann det mycket viktigt att robotens gemensamma bör följa efter och faktiskt böja. Ser tillbaka på tidigare modeller, den Pleo svans (som jag ansåg en misslyckad tentakel) visade sig vara en lämplig modell för ett gångjärn gemensamt.
Min första gemensamma design skapades för att möjliggöra införandet av ett PVC-rör eller tunnväggiga aluminiumrör i det gemensamma gavlar. Men efter utskrift det, insåg jag att jag var missnöjd med den. Det var inte bara tungt och med en hel del material, men jag kom till slutsatsen att fästa ihåliga rören är en överdriven användning av material. Jag skulle kunna ge samma mängd struktur med betydligt mindre material och bestämde fyra tunna aluminium stång var en bättre lösning än en enda ihåliga rör. Detta eliminerar majoriteten av det otympliga och tunga material som används, och generellt gör roboten lättare.
Den ursprungliga utformningen var att den hade ca 140 grader av flexibilitet, vilket gjorde det motsvarar en mänsklig armbågsleden. Detta gav en bra mätare för att göra en mindre spider gemensamma vilket behövs endast om +/-70 grader flexibilitet från center.
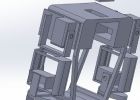
Min nästa design hade en Böj vinkel på +/-90 grader och hade en drastiskt ljusare design. På varje ändlock fanns fyra uttag avsedda för 3/16" stavar vara tryck passar in. Jag var ytterst nöjd med denna design som en generell gångjärn gemensamt.

CupBot - 3D tryckt Robotics plattform

3D tryckt ställningar för cellkultur

Smeka blick: 3D tryckt strukturer med SMA manöverdon

Design för en 3D tryckt kulinariska centrifug

3D tryckt modulära Mars livsmiljö modell

3D tryckt interplanetära raket

Cykel BoosterPack: En 3D tryckt bärbara elektriska Assist

BABY träd: 3D tryckt Quick-Change kamerafäste för en babyvakt

3D tryckta Raspberry Pi Tablet och vagga för VEX praktiken fält

3D tryckt Walking Robot

Aerobox - ett mjukt Robotics System

3D tryckta DIYbio mini centrifug

3D tryckta BATON - 100% 3D tryckt - utskrifter i en PRINT - redan har monterats - enda EXTRUDER - ingen stöder

CupBots - 3D tryckt Robotic plattform för Arduino och Raspberry Pi

Robotar för förändring: en första Robotics Team Fundraiser

3D tryckta visitkort

Liminal massa: 3D tryckt tak

3D tryckt reaktion Diffusion mönster