3D-tryckt Biologically-Inspired Robotics (18 / 44 steg)
Steg 18: Rumsliga Deformation med bälg









Anledningen till detta skulle fungera beror när en är långsträckt, en komprimering kraft skulle kunna tillämpas på ett motsatt segment, orsakar det styva segmentet att deformera och böja. Detta skulle möjliggöra för deformation i någon viss riktning. Denna konstruktion skulle också möjliggöra betydande kompression och expansion av tryckta segmentet. Detta skulle ge det ett antal egenskaper som liknar en faktiska tentakel.
Min första design med fyra bälgar mosaik så att var och en abutted två andra på vardera sidan. Efter att ha tillbringat lång tid rengöring ut stödmaterial inuti bälgen, blev det uppenbart för mig att det var en hel kolumn stöd på insidan av församlingen där alla tre bälgar träffade. När designen stod för närvarande, skulle jag ha något sätt att ta bort den. Detta var en uppsättning tillbaka eftersom det var att förhindra full kompression.
Jag försökte skriva ut den igen, men denna gång med ett 2mm hål i varje ände av den gemensamma jordbrukspolitiken. Detta var det största hålet min design skulle tillåta mig att placera. Detta hål var för liten för att ta bort någon meningsfull mängd stödmaterial, och också visat sig vara ett misslyckande.
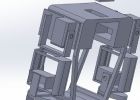
Slutligen slog det mig att fina med tessellation var att det var oändligt mycket repeterbara. Stället för alla fyra bälgar interlock, satte jag en bälg i mitten och en på vardera sidan av den. Att ha här centrala böla tillät mig att placera betydligt större hål i mitten av den gemensamma jordbrukspolitiken, och jag var äntligen ta bort allt stödmaterial. Detta innebar också att jag inte behövde betydligt äventyra utformningen och kunde bibehålla samma mängd deformation, komprimering och expansion. En nackdel med detta tillvägagångssätt var att diametern på segmentet blev något större.
Denna design var betydligt lättare att rengöra, och bara så lovande. Dock märkte jag att delen inte kan expandera utan sprickbildning längs den verkar. Det blev uppenbart att nedan behövs dras längs z-axeln att förhindra hyper-fördjupning. Också blev det uppenbart, att den nedan neutralläge behövde vara halvvägs mellan sin avlånga och kontrakterade position, så att stretching och komprimering av tentakel under användning.
Till en början ansåg jag begränsa det längs z-axeln med en kabel fäst längs dess central kanal som skulle göra det möjligt att komprimera, men inte expandera. Dock har jag sedan beslutat en smet tillvägagångssätt kan vara att skriva ut ett antal tjocka gummiband med suction cup-liknande knölar längs z-axeln.
Från och med tidpunkten för offentliggörandet har jag ännu att prova antingen strategi. Mest alla mina rumsliga deformation bälgen har läckande fläckar från upprepad hantering. Både utskrifter och rengöring en ny tar en avsevärd tid. Någon gång kommer jag återkomma till detta.

CupBot - 3D tryckt Robotics plattform

3D tryckt ställningar för cellkultur

Smeka blick: 3D tryckt strukturer med SMA manöverdon

Design för en 3D tryckt kulinariska centrifug

3D tryckt modulära Mars livsmiljö modell

3D tryckt interplanetära raket

Cykel BoosterPack: En 3D tryckt bärbara elektriska Assist

BABY träd: 3D tryckt Quick-Change kamerafäste för en babyvakt

3D tryckta Raspberry Pi Tablet och vagga för VEX praktiken fält

3D tryckt Walking Robot

Aerobox - ett mjukt Robotics System

3D tryckta DIYbio mini centrifug

3D tryckta BATON - 100% 3D tryckt - utskrifter i en PRINT - redan har monterats - enda EXTRUDER - ingen stöder

CupBots - 3D tryckt Robotic plattform för Arduino och Raspberry Pi

Robotar för förändring: en första Robotics Team Fundraiser

3D tryckta visitkort

Liminal massa: 3D tryckt tak

3D tryckt reaktion Diffusion mönster