3D utskrift en konstgjord muskel Robot Hand (10 / 10 steg)
Steg 10: Andra möjligheter

Foten motordriven kompressor
En av fördelarna med att använda luftdrivna muskler är att det bör vara möjligt att utforma en luftpump som passar i eller på en sko. Detta skulle kunna användas att pressa en liten platt ryggsäck tank när hon gick. Detta kunde hålla en protes hand och arm drivs i en ganska diskret sätt.
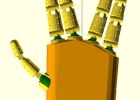
Finger senor
En sak saknas i denna första version av en robot hand är senor och muskler att dra fingrarna öppna. Just nu bygger den på styvheten i fingrarna, så det är lite plumsa. Jag experimenterade med olika senor (silikon gummiband) och ligament att öppna fingrar. Tyvärr, de allvarligt försvåras gripa makten på fingrarna.
När en arm är byggt, kunde det hus fyra eller fem air muskler som drar på senor att öppna fingrar. Jag har också arbetat på pull typ muskler som använder senor.
Högre tryck
Jag använde överskott ventiler för muskel-styrenhet och de kan endast hålla ca 9 psi. Jag testar för närvarande vissa 3d tryckta ventiler som jag designade som fungerar upp till 30 psi. Detta kommer att öka gripa makten och hastigheten på fingrarna avsevärt.
Robot protesarm
Jag har börjat jobba på en mänsklig storlek arm, men det är ännu inte klar. Jag jobbar på att göra min egen lätta ventiler som passar i armen.

Air muskler: Gör en konstgjord muskel Robot Controller

Mjuk robotar: Göra en konstgjord muskel Arm och gripdon

Prostetiska/Robotic Hand utskrivbara som en monterad enhet utan stöder

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Ada Robotic Hand - Open Bionics

Kontrollerbar Robotic Hand med Flex sensorer & servon

DIY Robotic Hand kontrolleras av en handske och Arduino
Ge dig själv en (Robotic) Hand

Robotic Hand kontrolleras av Power Glove

DIY robotic hand

Arduino Robotic Hand med Haptic Feedback
DIY konstgjord muskel

DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Lego Mindstorms NXT robot Hand prototyp
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand

Jag gjorde en Robot Hand
