Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt) (4 / 18 steg)
Steg 4: Handen: montering fingrar




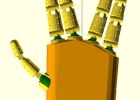
Varje finger (förutom tummen, omfattas separat) kräver 3 gemensamma Pin delar att ansluta segmenten (2: a bild). Du kan ersätta en kort 1/8" bult här, men dessa 3D tryckta pins fungera alldeles utmärkt. Som tidigare nämnts, det är mycket viktigt att det finns som liten friktion som möjligt i lederna - de ska röra sig fritt för hand (det vill säga manuellt - ingen ordlek avsedd) inom deras spänner av rörelse. För att säkerställa detta, se till ledtapparna är som cylindriska som möjligt och det finns utrymme mellan de anslutande ytorna av segment. Förmodligen hittar du det lättare att passa in stiften i om du borra upp hålen till 1/8", såvida inte skrivaren har exceptionella cirkulär toleranser.
Se till att använda rätt delar för varje finger, annars kan det se ganska deformerade och inte flytta ordentligt. När du har samlat de 3D tryckta delarna, skjut servon i skårorna i framknä (den större bit) på samma sätt som den sista bilden i det här steget. Servon måste ordnas ordentligt annars fingrarna brukar passa ihop bra i handflatan, om alls.
Innan du kopplar sladdar och servo armar, finger bör vara i rätt riktning: krypa inåt såvitt det kan när du bifogar den översta tråden och räta ut det. När du bifogar botten tråd. Detta kommer att säkerställa att båda servon kan rotera igenom så mycket av deras rörelseomfång som möjligt.
I bilderna hade jag redan rätt längd tråd krävs, men när du är att dra det från en spole som hjälper det för att tråden genom öglorna på fingrarna från baksidan av först segmentera upp genom att tredje, sedan vrida det till en bra krok (tång nål näsa!) som brukar komma ogjort och brukar ge mycket när dras eller skjuts. När du får det bundna av slutet av fingret, släppa ut tillräckligt för att nå servo armen och sedan tillräckligt extra att ansluta den genom armen. Du kan alltid klippa något extra av kabeln, som är mycket lättare än threading en ny.
Obs: Jag försökte skriva ut ett framknä bit för pekaren med öglor på toppen och botten för att se om det skulle hjälpa med rörelseomfång. Den övre delen hjälpte lite, men botten hamnade begränsar förslaget om att servo, så totalt är det förmodligen inte värt threading genom dessa loopar.
Bifoga de enda vapen till servon blir lite knepigt, och jag tillbringade en hel del tid omorientera armarna för att få dem att flytta inom korrekt rörelseomfång. För att göra det lättare att kalibrera senare, kan du vänta med att skruva armarna till servon förrän efter köra installationsprogrammet för att flytta alla armarna till deras start vinklar; annars vill ett bra ställe att börja att fästa varje arm till servo sådan att när servo är vid 0 grader det pekar direkt till antingen framsidan eller baksidan av handflatan.

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Kontrollerbar Robotic Hand med Flex sensorer & servon

Robotic Hand med gest recogntion - AVATAR
Enkel och billig ROBOT HAND med endast en MOTOR!

Hur man bygger en robot Hand med Haptic Feedback

3D utskrift en konstgjord muskel Robot Hand

Ada Robotic Hand - Open Bionics

Mind kontrollerade Robotic hand

3-fingrade Arduino robot hand
Ge dig själv en (Robotic) Hand

DIY IV tillgång praktiken arm med flyter blod

Göra Robot röster med fri programvara

DIY robotic hand
DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand
