Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt) (16 / 18 steg)
Steg 16: FTOEC: montering






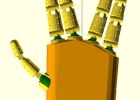
Starta genom att montera servo till innehavaren del, se till att trä tråden genom det lilla hålet i botten, sedan använda en del av skruvarna för att fästa dem tillsammans. Var försiktig med skruvarna på sidan nära arc: det är lite svårt att berätta från bilderna, men den 3: e bilden visar lite hur FTOEC staven kan fastna på skruven som håller servo på plats, att förhindra servo från svarvning, som drar mer ström och kan orsaka Arduino att återställa.
Om du vill infoga FTOEC staven genom båge, driva igenom med läpp längs bågen och sedan vrida den ut igen när det är på andra sidan. Staven behöver för att kunna resa genom båge som servo visar, så position servo arm sådan som i ena änden av sitt rörelseomfång staven är samma slutet av bågen. Efteråt, placera servo armen så att vinklad koppling passar med FTOEC stången på botten (mittemot från sidan indikeras med en pil på bilderna) och skruva fast plattan till servo genom servo armen.
Denna del är ganska svårt att beskriva verbalt, så förhoppningsvis bilder och anteckningar mer meningsfullt. Målet är att staven för att kunna flytta genom båge från ena änden till en annan när servo visar, med stav alltid på undersidan av armen. Min ursprungliga design hade staven på topp (i spänning, snarare än kompression), och det kan fortfarande vara möjligt att omorientera delarna för att göra det, men drog jag av misstag delar så att staven skulle svänga runt på andra sidan av servo i denna konfiguration. Hur som helst, denna del riskerar att få en ny utformning inom en snar framtid, så det inte är en slutlig design.
OCH DET ÄR DET FÖR HÅRDVARA! Toppen!!! Nu är allt som återstår att programmera det! *Gulp* även om jag inte kan göra något alltför märkvärdigt med det. men, jag har en bra start på en kod som gör att du kan programmera i motioner och styra armen ganska lätt. Vidare till nästa steg!

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Kontrollerbar Robotic Hand med Flex sensorer & servon

Robotic Hand med gest recogntion - AVATAR
Enkel och billig ROBOT HAND med endast en MOTOR!

Hur man bygger en robot Hand med Haptic Feedback

3D utskrift en konstgjord muskel Robot Hand

Ada Robotic Hand - Open Bionics

Mind kontrollerade Robotic hand

3-fingrade Arduino robot hand
Ge dig själv en (Robotic) Hand

DIY IV tillgång praktiken arm med flyter blod

Göra Robot röster med fri programvara

DIY robotic hand
DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand
