Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt) (6 / 18 steg)
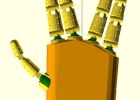
Steg 6: Handen: ansluta fingrarna tillsammans



Vart och ett av fingrarna ansluter till dess motsvarande bult hål i framknä korsningen. Om du bara bygger handen, 1" lång 1/8" bultar (6 x 32) fungera bra, men om du planerar på att bygga handleden du vill använda 1,5" bultar för pekaren och lillfingret anslutningar.
A note om gängning: för dessa anslutningar liksom de flesta andra bult anslutningar på armen, jag rekommenderar minst en av de två anslutande delarna bör ha ett gängat hål. Detta sätt om nötter kommer förlora ingenting kommer att falla av (rätt bort åtminstone). När ut är hålen på de flesta om inte alla delar bara tillräckligt liten så att du tråd dem genom att köra en bult genom den. Alternativt kan du borra ut ett hål för att möjliggöra enklare montering, men tänk att när du borra ut ett hål till en större storlek du kommer inte att kunna tråd det igen, åtminstone inte lika effektivt som tidigare. De två platserna skulle jag faktiskt rekommendera borrning är i fingrarna och i sida-handled bult hål i framknä korsningen, vilket bidrar till att minska friktion i de fogar ihop.
Går vidare, om antingen fingret eller motsvarande bulthålet i korsningen är gängade, se till att placera delar så nära varandra som möjligt innan skruvning bulten genom, i 2: a bilden visas annars förmodligen måste du antingen starta om eller förstöra trådar på fingret att få bulten hela vägen. Dra åt dem som nödvändiga, men lämna lite slack för att tillåta dem att sprida förutom spridning servo.
Också, för att hålla fingrarna från att spridas för mycket på egen hand, kan du sträcka några gummiband runt handen för att hålla ihop. Detta är särskilt viktigt för tummen, som (i den nuvarande utformningen) fortfarande är lite lös.

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Kontrollerbar Robotic Hand med Flex sensorer & servon

Robotic Hand med gest recogntion - AVATAR
Enkel och billig ROBOT HAND med endast en MOTOR!

Hur man bygger en robot Hand med Haptic Feedback

3D utskrift en konstgjord muskel Robot Hand

Ada Robotic Hand - Open Bionics

Mind kontrollerade Robotic hand

3-fingrade Arduino robot hand
Ge dig själv en (Robotic) Hand

DIY IV tillgång praktiken arm med flyter blod

Göra Robot röster med fri programvara

DIY robotic hand
DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand
