Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt) (3 / 18 steg)
Steg 3: Del 1: handen: fingrar

En trevlig fördel av denna protes att vara modulära är att om du bara vill bygga handen ner genom palm eller handled, du kan göra det utan att behöva ersätta olika delar, och kan lägga till det senare. Jag har skrivit detta Instructable i delar så att du inte behöver gå igenom hela guiden om du bara vill bygga hand och handled, t.ex. Denna första del kommer detalj hur man bygger handen.
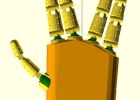
Vart och ett av fingrarna byggs i huvudsak på samma sätt, så jag bara har bilder av pekaren finger församlingen. Om det är fortfarande oklart jag kan få fler bilder av de andra, men det är i princip samma process. Dessutom när du skriver ut CAD-filerna, alla 5 fingrar använder samma "Pekaren 1" lappa, pekaren och små fingrar använder samma "pekaren 2" som deras andra segment, och den och ringfinger alla använder samma "Mellersta 2" del i deras sekunder. Alla 5 fingrar använder samma "Pekaren 3" del för segmentet tredje/slutlig. För att göra det lättare, är här en lista:
- Pekaren: 1,2,3
- Mitten: 2,2,3
- Ring: 2,2,3
- Liten: 1,2,3
- Tumme: 1,3

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Kontrollerbar Robotic Hand med Flex sensorer & servon

Robotic Hand med gest recogntion - AVATAR
Enkel och billig ROBOT HAND med endast en MOTOR!

Hur man bygger en robot Hand med Haptic Feedback

3D utskrift en konstgjord muskel Robot Hand

Ada Robotic Hand - Open Bionics

Mind kontrollerade Robotic hand

3-fingrade Arduino robot hand
Ge dig själv en (Robotic) Hand

DIY IV tillgång praktiken arm med flyter blod

Göra Robot röster med fri programvara

DIY robotic hand
DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand
