Modulära Robotic Hand & Arm (med Extended Range of Motion) (3D tryckt) (5 / 18 steg)
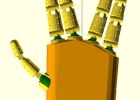
Steg 5: Handen: montering tummen





Tummen är monterade i mestadels på samma sätt som de andra fingrarna med vissa ytterligare delar för ytterligare rotation axlarna. Följ föregående steg för att montera finger portion, sedan sätt tummen spak 2 del i kortplatsen på framknä. Jag hade vissa problem med toleranser på mina utskrifter, så det inte passar riktigt så långt det bör eller komma ut mycket lätt. Sätt en enda servo arm i kortplatsen på undersidan av spaken och kontrollera kanal på topp i linje med hål i mitten av servo anslutning cylindern.
För mellanliggande spaken montering, bifoga ett servo till tummen spak 1 del som visas i bilden, och skruva ner minst 1 av sidorna. Sätt en enda servo arm i kortplatsen på sidan och sedan bifoga det med en skruv eller limma fast den på plats. Det finns en kanal genom andra sidan servo arm facket att tillåta åtkomst till skruven bifogas till servo, så göra säker kanal linjer med hål i mitten av servo armen.
Sätt in en annan servo i sidan fack på framknä korsningen, som visas i bilden, vilket gör att första tråd trådarna genom hålet i sidan. I min församling hade jag redan monterade servo på plats ganska hårt, så jag inte ville riskera att skada det eller trådarna genom att dra det hela vägen ut (toleranser!). Fäst i servo arm i kanalen av tummen spak 1 detta servo, sådant att 0 grader är i vinkel på sista bilden. Slutligen fäster servo armen i tummen spak 2 till servo spaken 1 som på första bilden - vinkeln bör vara sådan att orientering i den första bilden är nästan vid den maximala vinkeln på spaken 2 servo. Återigen, det är mycket lättare att kalibrera dessa servon genom att köra installationsprogrammet skissen och sedan fästa armarna.

Hur man gör en avlägsen kontrollerade Robotic Hand med Arduino

Arduino Robotic Hand med Haptic Feedback

Kontrollerbar Robotic Hand med Flex sensorer & servon

Robotic Hand med gest recogntion - AVATAR
Enkel och billig ROBOT HAND med endast en MOTOR!

Hur man bygger en robot Hand med Haptic Feedback

3D utskrift en konstgjord muskel Robot Hand

Ada Robotic Hand - Open Bionics

Mind kontrollerade Robotic hand

3-fingrade Arduino robot hand
Ge dig själv en (Robotic) Hand

DIY IV tillgång praktiken arm med flyter blod

Göra Robot röster med fri programvara

DIY robotic hand
DIY $200 Robotic Hand - Arduino projekt
DIY $200 Robotic Hand - del 2: The Controller - Arduino projekt
Interaktiva robotic hand genom att använda arduino...

Dextrus v1.1 Robotic Hand
